今回はHoudini APEXの練習を兼ねて、
@Nelzonis2氏が作ったゴジラのモデルを使ってHoudiniのAPEXでリグを組み、
ゴジラが咆哮するシンプルなアニメーションを作ってみた。
段々とHoudini APEXの使い方がわかってきたが、
これって行列の知識とAPEXスクリプト(Python)の習得が必須なのでは…

今回はHoudini APEXの練習を兼ねて、
@Nelzonis2氏が作ったゴジラのモデルを使ってHoudiniのAPEXでリグを組み、
ゴジラが咆哮するシンプルなアニメーションを作ってみた。
段々とHoudini APEXの使い方がわかってきたが、
これって行列の知識とAPEXスクリプト(Python)の習得が必須なのでは…
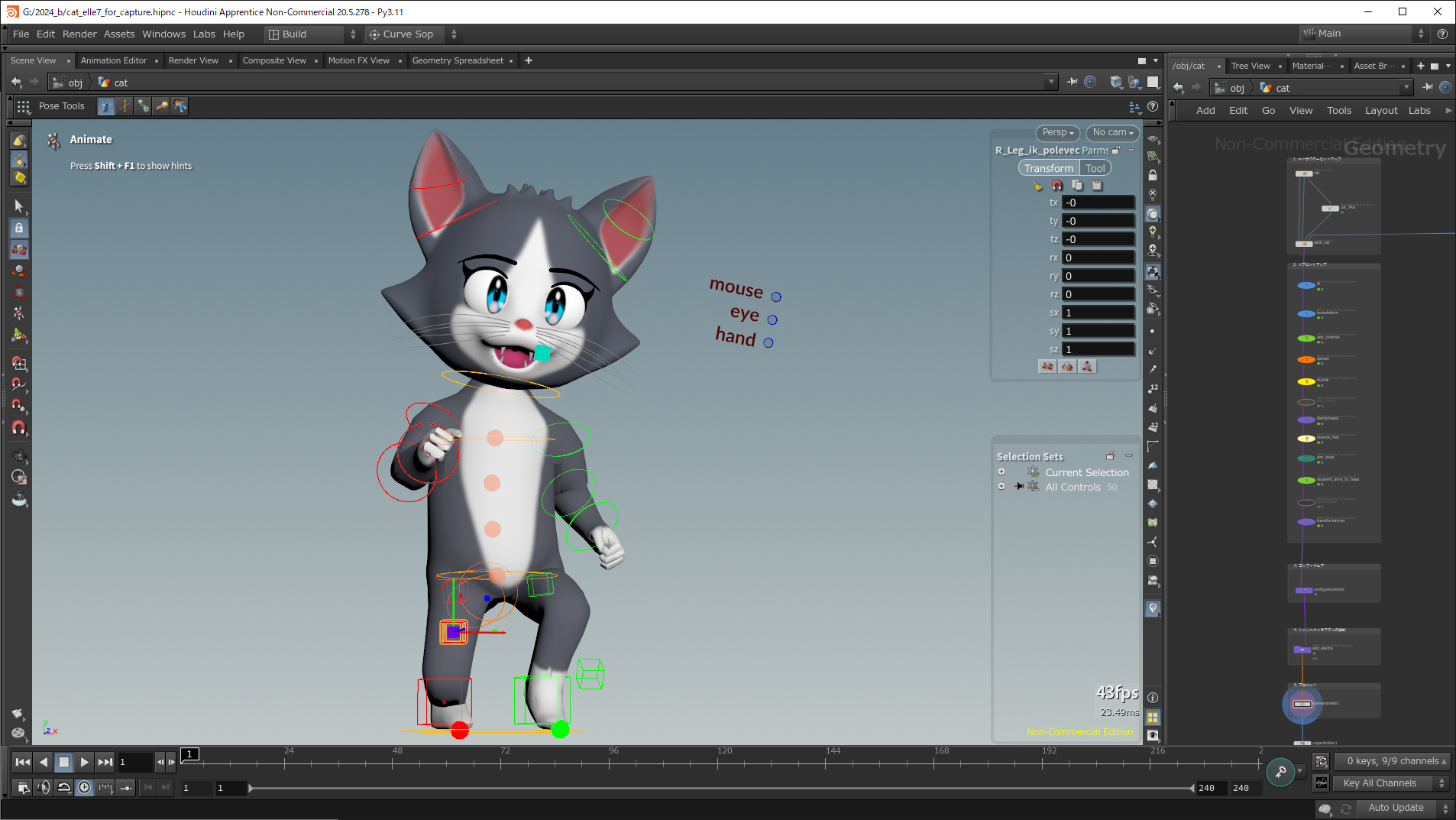
今回は以前作成したKineFXリグをApexリグに変換した後、
Apexリグにセカンダリモーションを組み込んでみた。
セカンダリモーションは猫の耳部分に設定。
首ジョイントの動きと連動しながら耳が自動で揺れるようにしてみた。
簡単にできると思ったが、かなり手こずった。
今回参考にしたのはSideFXの以下のドキュメント。
https://www.sidefx.com/docs/houdini/character/kinefx/animationworkflow.html#add_animation
今回使用したSecondaryMotionノードを使う場合に注意すべき点としては、
キャラクターなどのスケルトンをミラーコピーした場合にはドライバージョイントと
ドリブンジョイントのローカル軸の向きが全て一致していないと期待した動きにならない。
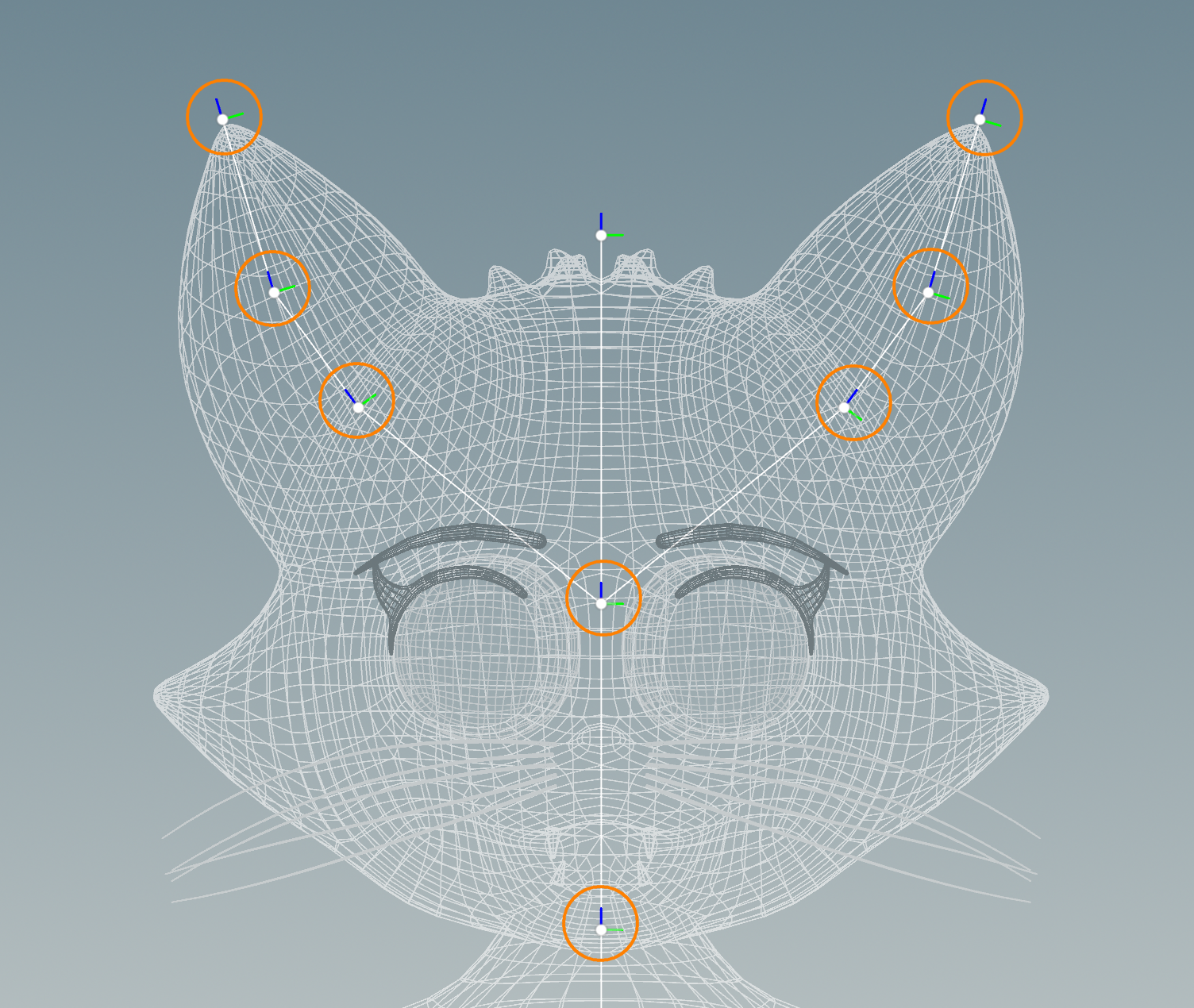
これはOrientJointsノードを使用すれば簡単にできるが、全部のジョイントに対して
行ってしまうとAPEX側のリギングのリバースフットで不具合がでるため
首から上にに限定して実行した。
これはKineFX側とAPEX側の一部のノードで、想定しているジョイントのローカル軸の向きが
違うことが原因だと思われる(多分)
やっとHoudini20.5が使用できる環境になったので
以前作った猫のリグをAPEXを使って再実装してみた。
今回初めてAPEXを触ってみたが
基本的なスケルトンのセットアップがされていれば
今まで以上にリグは作りやすくなったと思う。
特に、Houdini20.5から実装されたタグ付けは非常に便利で
タグを使ってスケルトンの特定部分にセグメントを作り、
そのセグメントに対して様々な処理を行うことが可能になった。
また、APEXは遅延実行の仕組みを持っているため
以前のRigPoseを使用したアニメーション作成よりも
インタラクティブな実行スピードが格段に上がっている。
HoudiniのリグシステムはAPEXで3世代目だが、
やっと実行スピード的に満足できるものが実装された。
さらにAPEXスクリプトを効果的に組み込んでいけば
ほかのDCCでは難しいキャラクターリグも作っていけるだろう。
Houdiniでスーパーヘビーなシーンを作るためには
マシンスペックやメモリも大事だが、
それ以上に最適化(オプティマイズ)のテクニックが重要になってくる。
その時いつも思うのだが↓のようなタイトルの本が欲しくなる。
「Houdini 珠玉の最適化テクニック集50選!」
Houdiniを使ってる人の10人くらいには刺さると思う。
誰か書いてくれないかな。
先日映画「ツイスターズ」を観に行った。
その影響を受けて今回Houdiniで竜巻シーンを作ってみた。
竜巻の作り方は数パターンあるのだが、
今回はPOPでらせん状にパーティクルを動かし、それをVDB化。
そして毎フレームPyroにdensityとvelボリュームをソースとして渡す手法でやってみた。
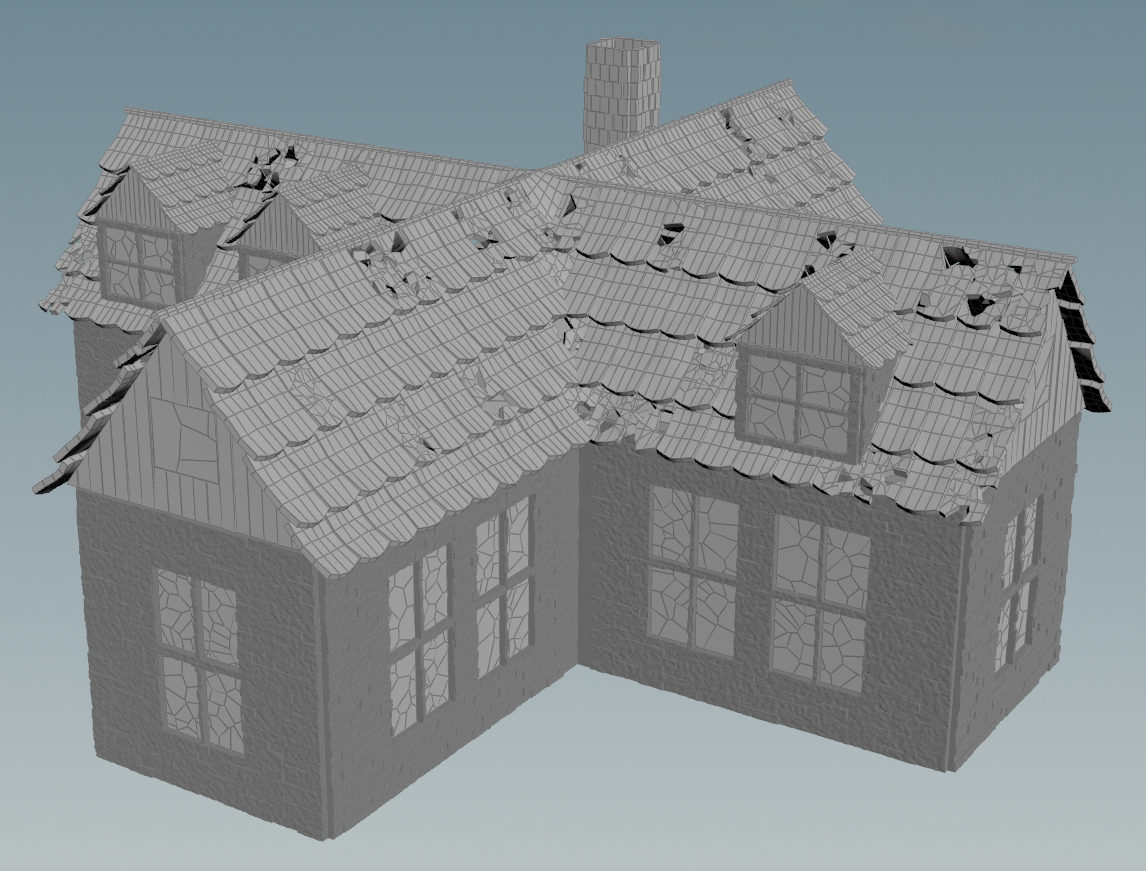
家屋は約1万個のRBDピースから構成。
家屋のアセットも作成した。
まず以下のようなシンプルなモデルを作成する。
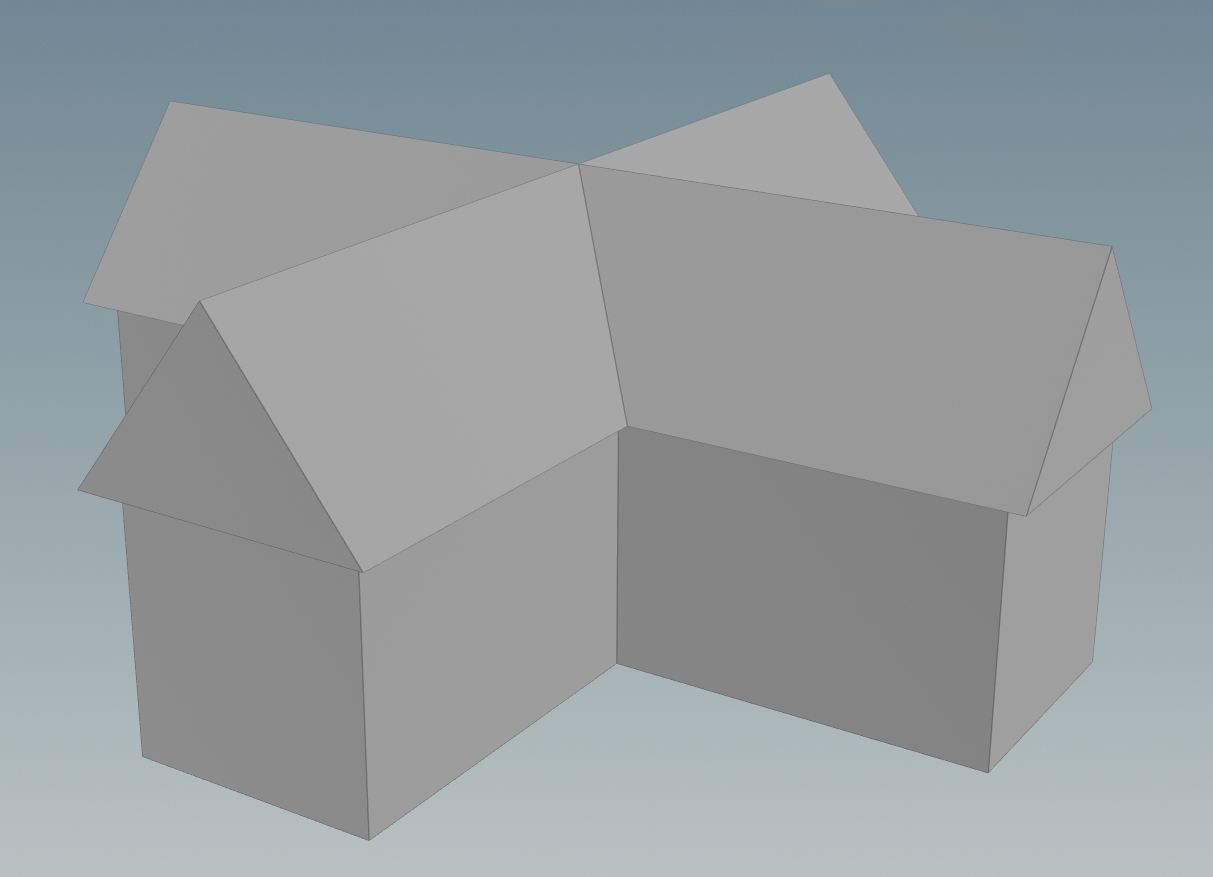
そしてこのモデルをアセットに渡すと、アセットが家屋のすべてのディテール
(瓦屋根、窓、壁のレンガ、煙突など)を自動生成するようにしてみた。
ちなみに8年前にも竜巻シミュレーションを行っていたのだが、
当時と現在ではワークフローが全く異なっている。
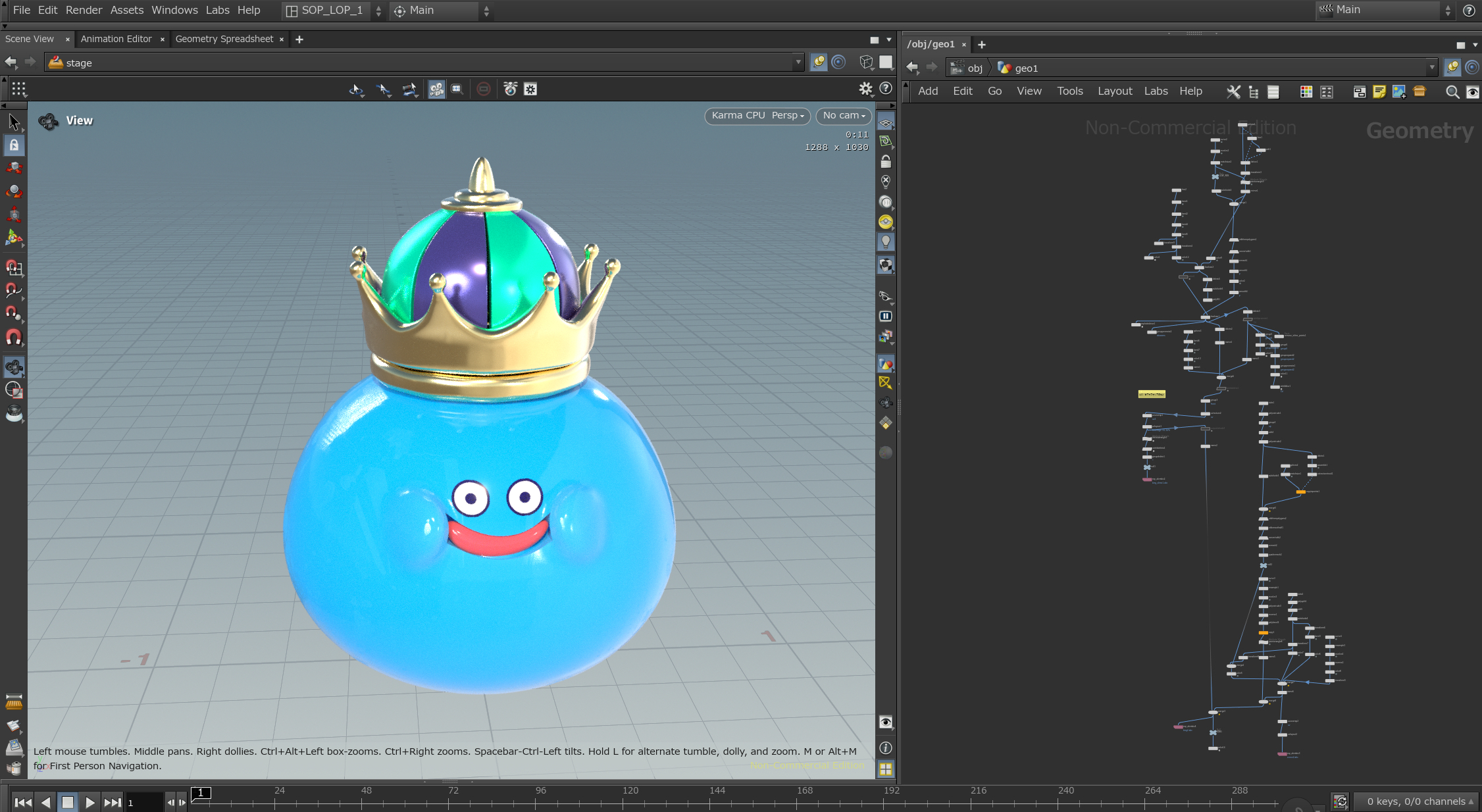
HoudiniのCHOPを使ってカメラの振動を実装してみた。
スライムの着地に合わせてカメラの振動はプロシージャルに発生するようにしてある。
つまり目で見て合わせるのではなく、全て自動でカメラが振動する。
さらに破片や煙も同様にプロシージャルに自動で生成するにようにしてみた。
CHOPはHoudiniではあまりスポットライトが当たらないが
マスターすると様々な場面で活躍してくれる。
キングスライムはHoudiniでフルスクラッチで作成。
モデラーではない自分にとってはこんなシンプルなモデルでも半日かかる。
https://www.sidefx.com/ja/houdini-hive/houdini-205/
6月18日にHoudini 20.5の発表イベントがあるが、
新機能の中に”copernicus”というものがあるらしい。
以下のSidefxのフォーラムでも話題になっているが、
COPernicusは、おそらくCOPが完全刷新されたものと予想されている。
https://www.sidefx.com/ja/forum/topic/94406/?page=2#post-423180
その場合「APEX上に実装されたCOP」というのが一番ありそう。
ついにポストエフェクトまでHoudini上で完結できるようになるのか。
自分のPCのメモリを256GBに増やして、ホワイトウォーターの計算精度を上げて
Houdiniでシミュレーションを行ってみた。
ある程度のシーンの規模でホワイトウォーターの計算精度を上げていくと
メモリを200GB近くすぐに消費する。
メモリの価格は比較的安定しているため、メモリは積めるだけ積みたいが
Ryzen Threadripper用のマザーボードは最大256GBになっている。
ちなみに最新のThreadripper Proのマザボだと2TBまでいけるらしい。

Here is my latest demo reel.
All work in the reel is personal work created with #houdinihttps://t.co/88QuO3DosD[Vimeo]https://t.co/q2re63kwcY#sidefx #houdini #houdinifx #flipfluid
— Shuichi Sakuma (@selenelight3d) April 4, 2024
今まで作ってきたHoudiniの個人作品を3分のリールにまとめてみた。
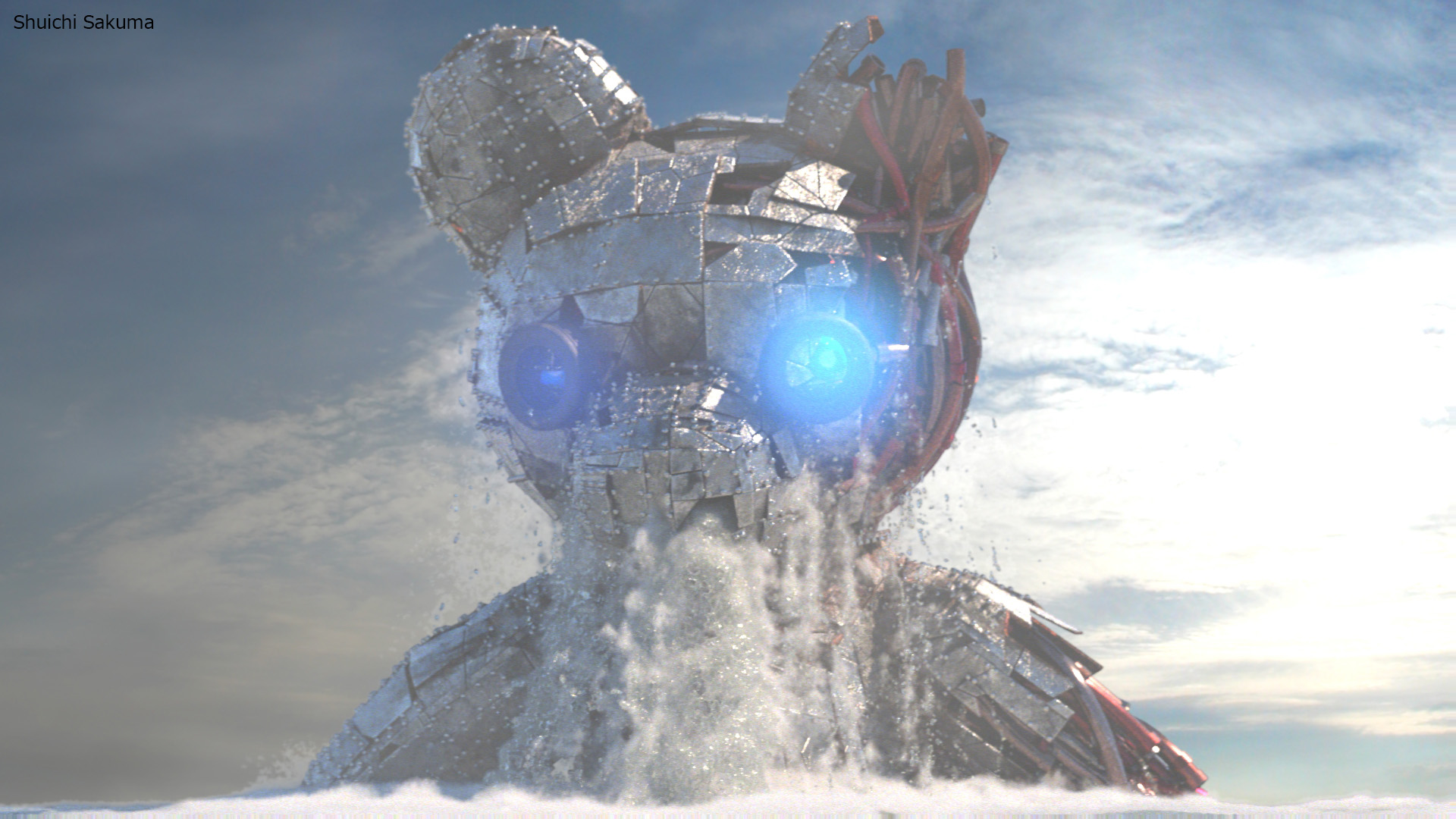
今回新しくリールに追加した作品はクマ型のロボットが海中から出現するFLIPシミュレーション。
モデルはHoudiniで作成し、装甲や内部のパイプはプロシージャルにモデリングした。
テクスチャー作成にはサブスタンスペインターを使用。コンポジットはNuke。
![]()

モデルのサイズはそこそこ巨大なため、ホワイトウォーターのパーティクル数は億を超えた。
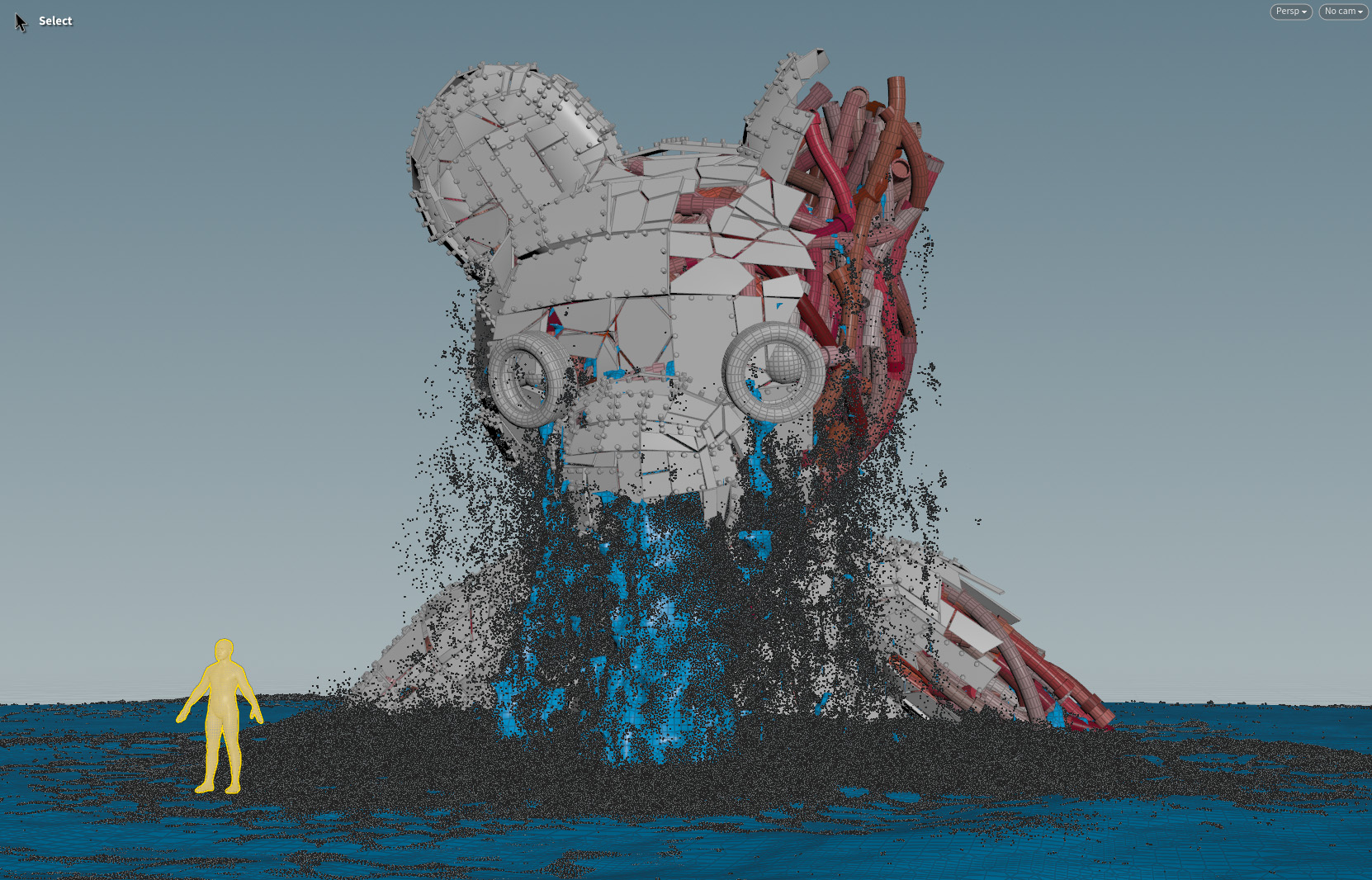
この規模だと作業PCのメモリは128GBでは厳しかったため、
ホワイトウォーターのシミュレーション精度は少し下げてシミュレーションを行った。
規模の大きなFLIPシミュレーションを行うためにはメモリは256GB必要だと毎回痛感する。