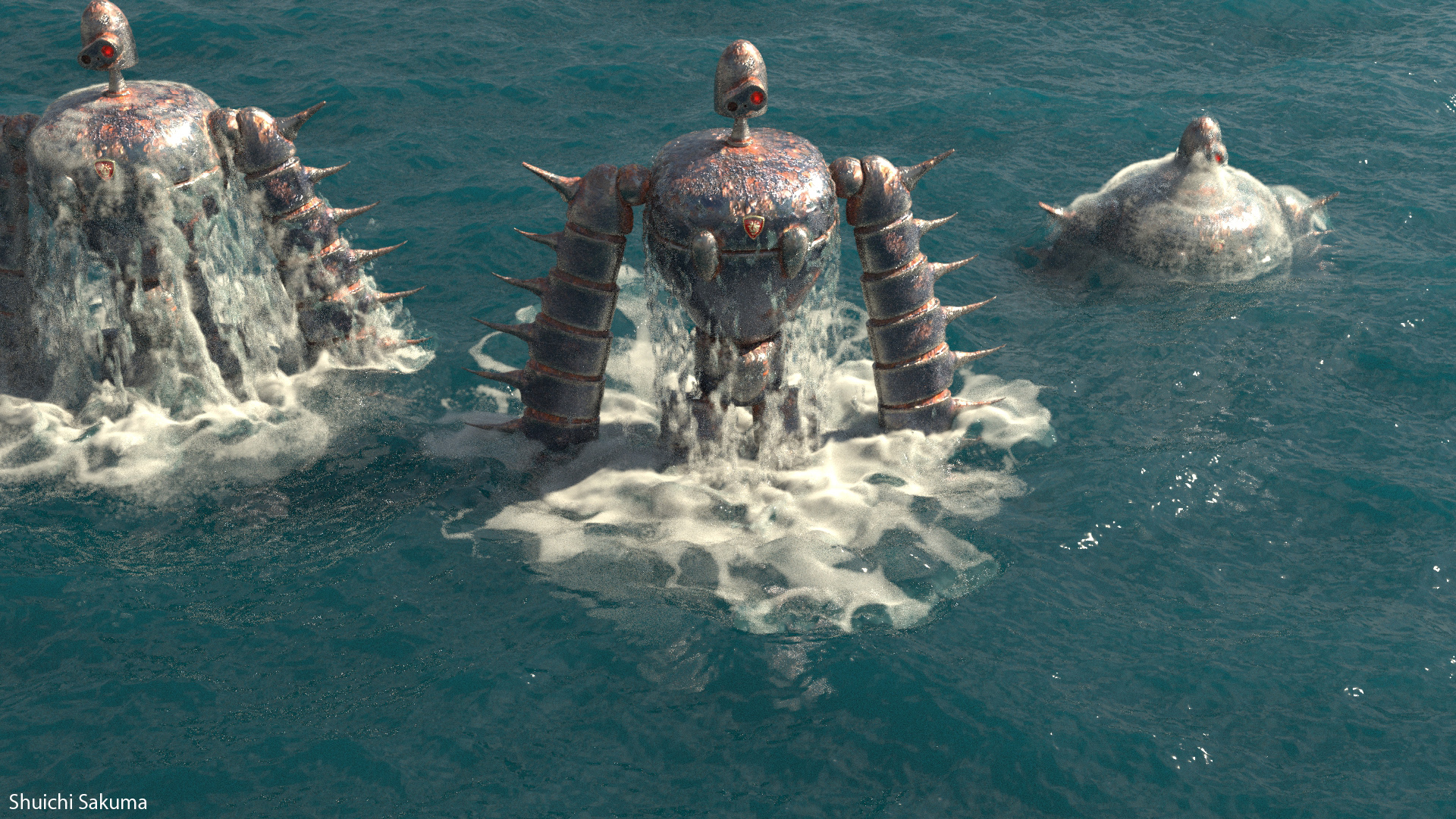
引き続きHoudini FLIPの研究。
今回の製作期間はR&Dを含めて3ヶ月くらい。
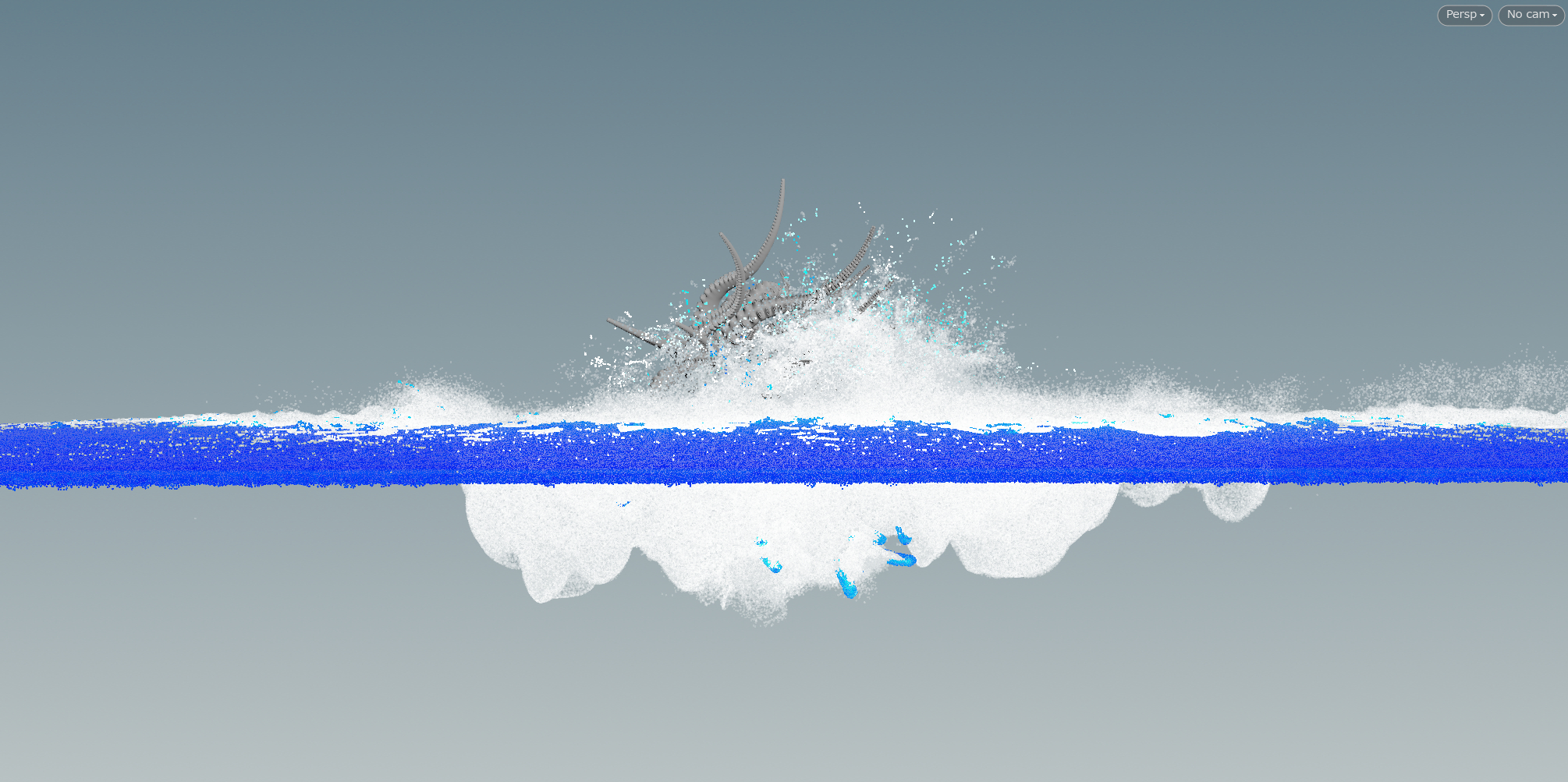
ホワイトウォーターは自前で実装したものを使用。
Houdini FLIP R&D from Shuichi Sakuma on Vimeo.
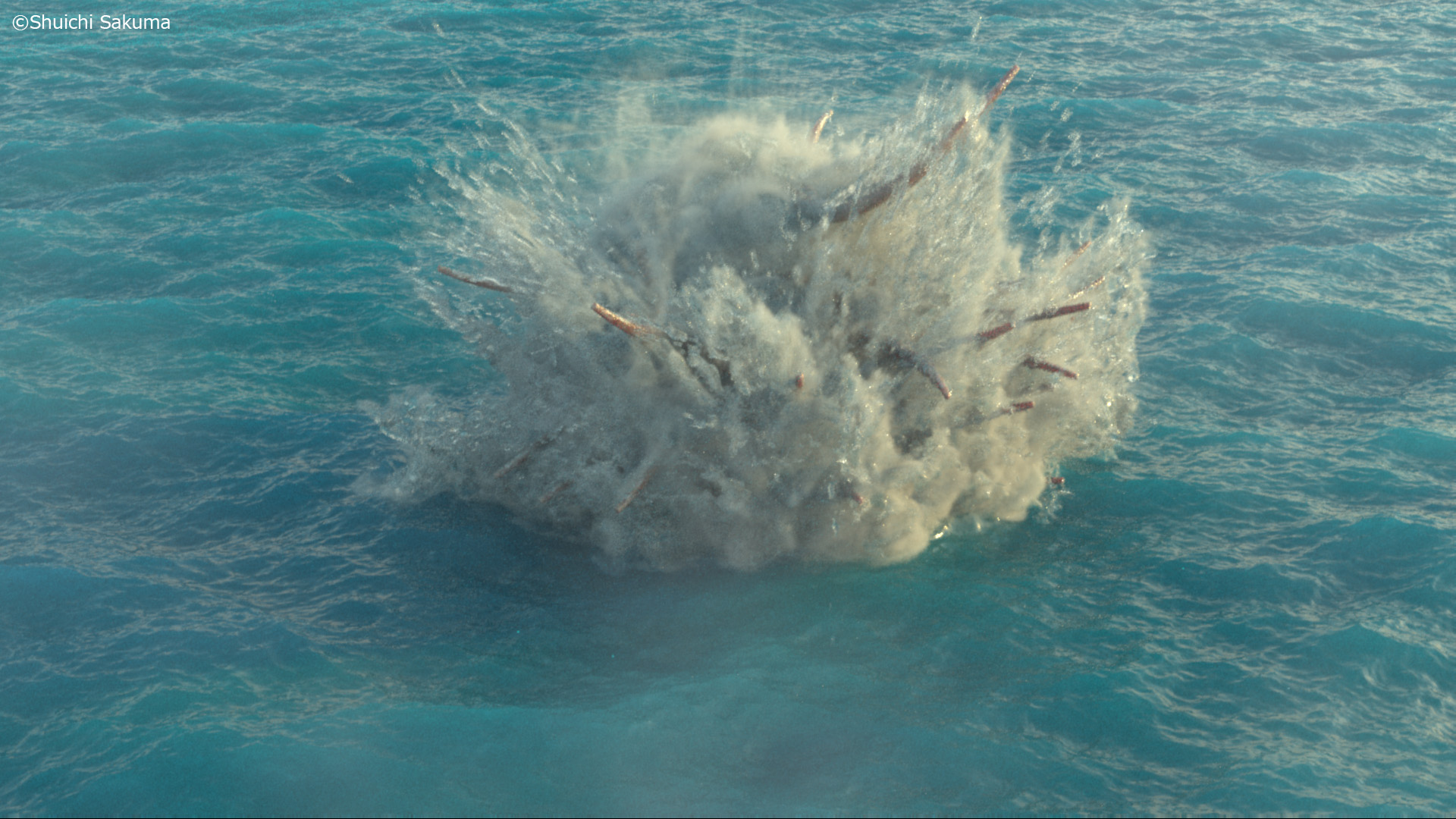
シェーダに関しては映画「ナルニア国物語2」の水のキャラクターを参考に調整した。
ボリュームシェーダをメインに使用し、水のスペキュラーハイライトを出すために
一部サーフェイスシェーダを使用した。

レンダリングにはKarmaを使用。
最適化を行い、レンダリング時間はFull HDサイズで
Threadripper3970X(メモリ128GB)で1フレーム30分以内に収めた。
今回は水のデータ量が膨大になったので、複数のFLIPソルバに分けて対応した。
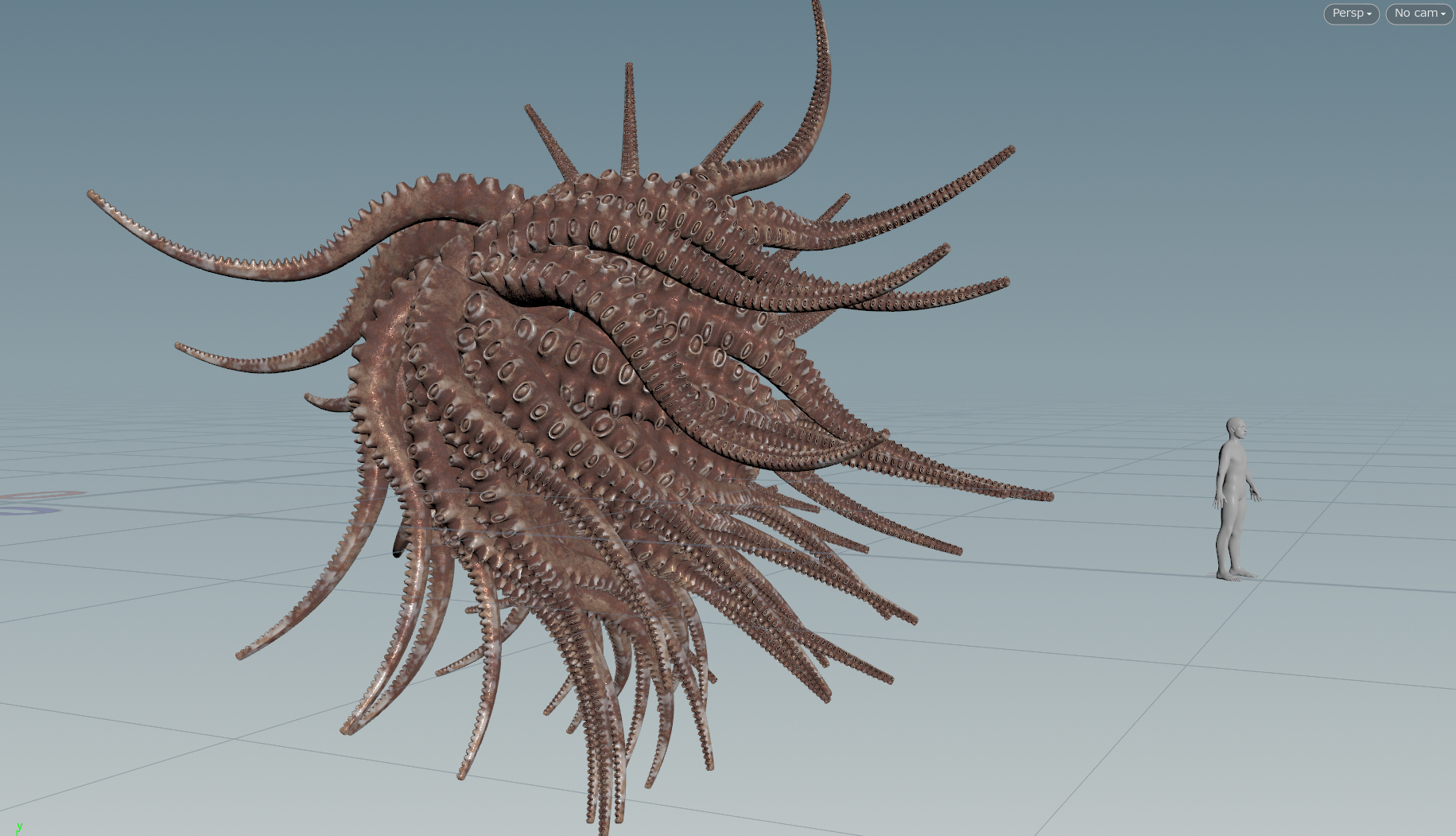
また、体の部位に応じて水の動きをコントロールするためのそれぞれのベクトルフィールドを作成した。特に顔に関してはカーブを使用し、顔のトポロジーの流れに沿って水が流れるようにコントロールしてみた。
水の飛沫を表現するために、DOP内で@ballisticと@ageアトリビュートを使用した。
これにより、FLIPパーティクルはキャラクターの皮膚から発生した直後の数フレーム間は
FLIPの速度ベクトルフィールドから影響を受けずに自由に動き回れるようにしている。
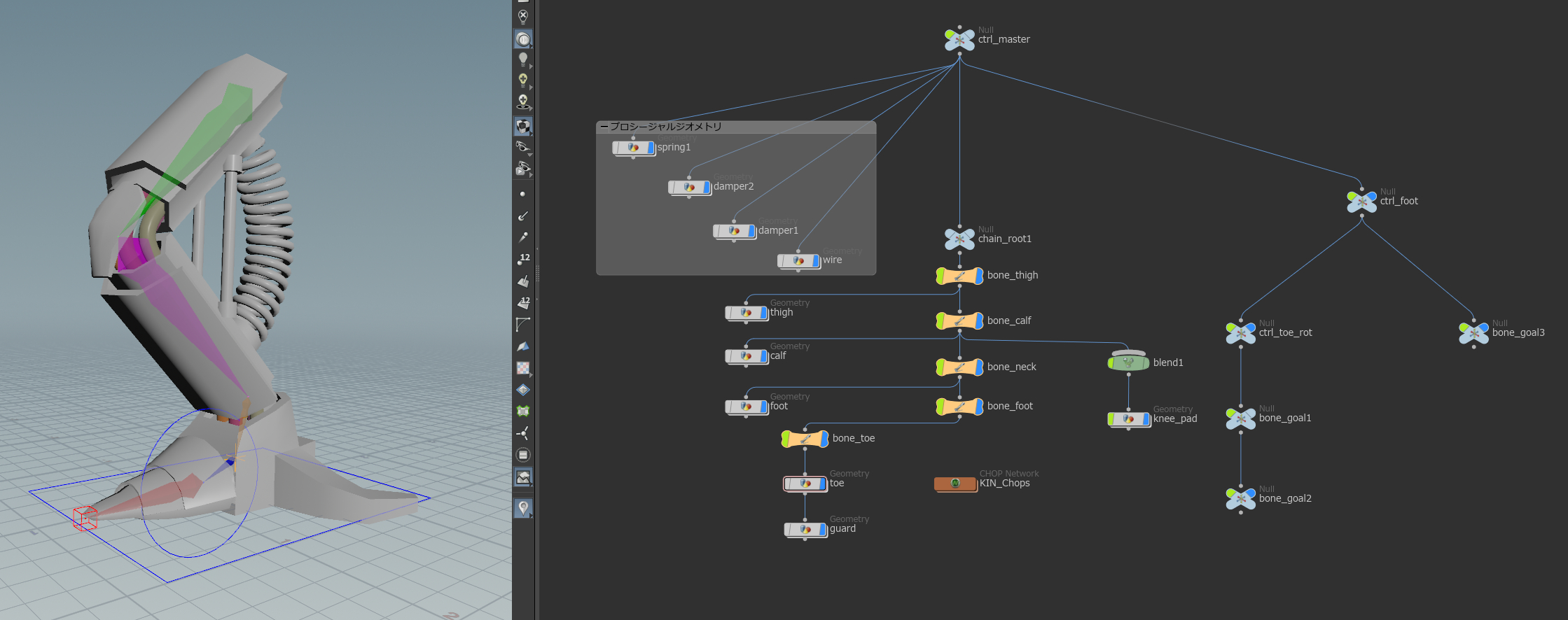
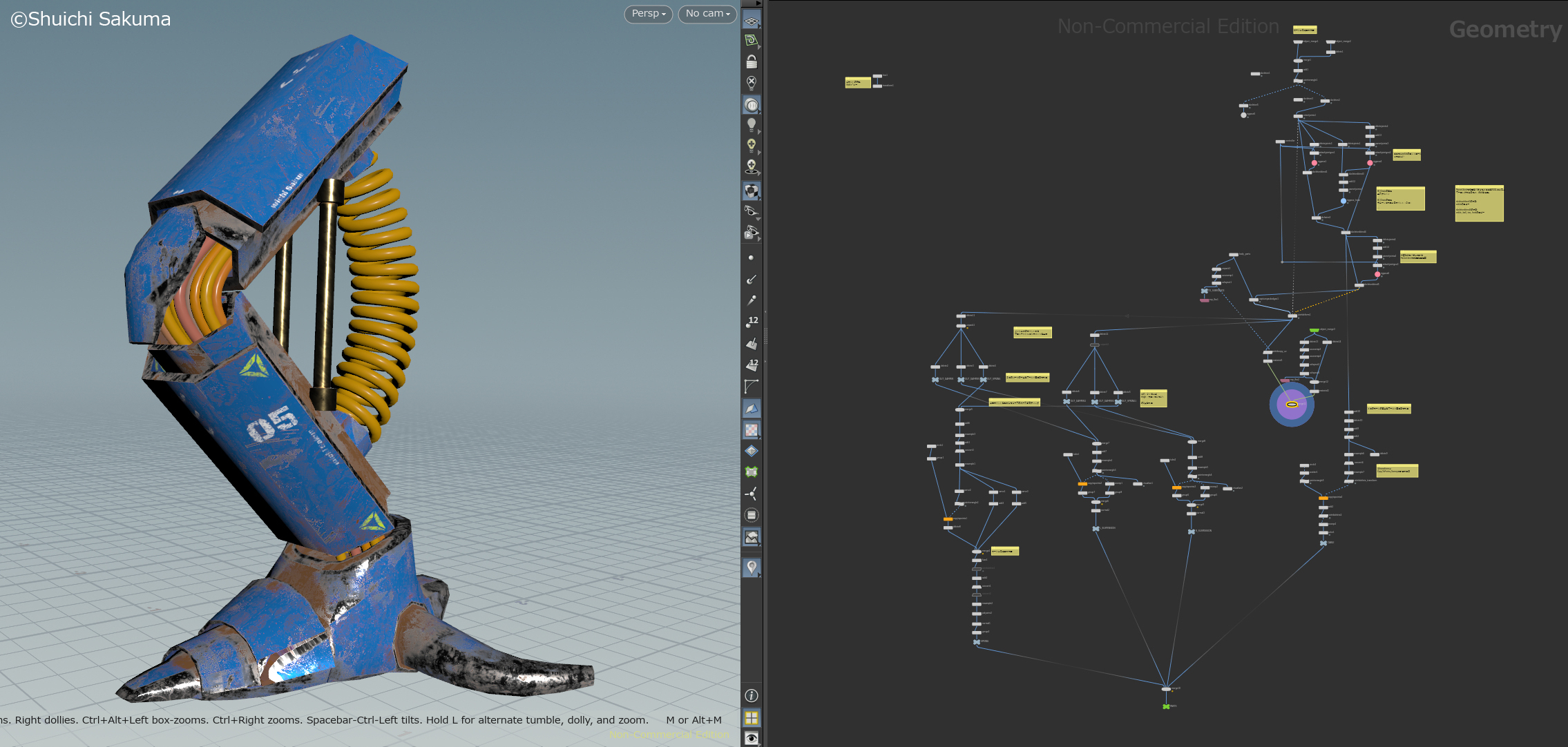
キャラクターのアニメーションはKineFXを使ってHoudini内でキーフレームで作成した。
コンポジットはNuke。
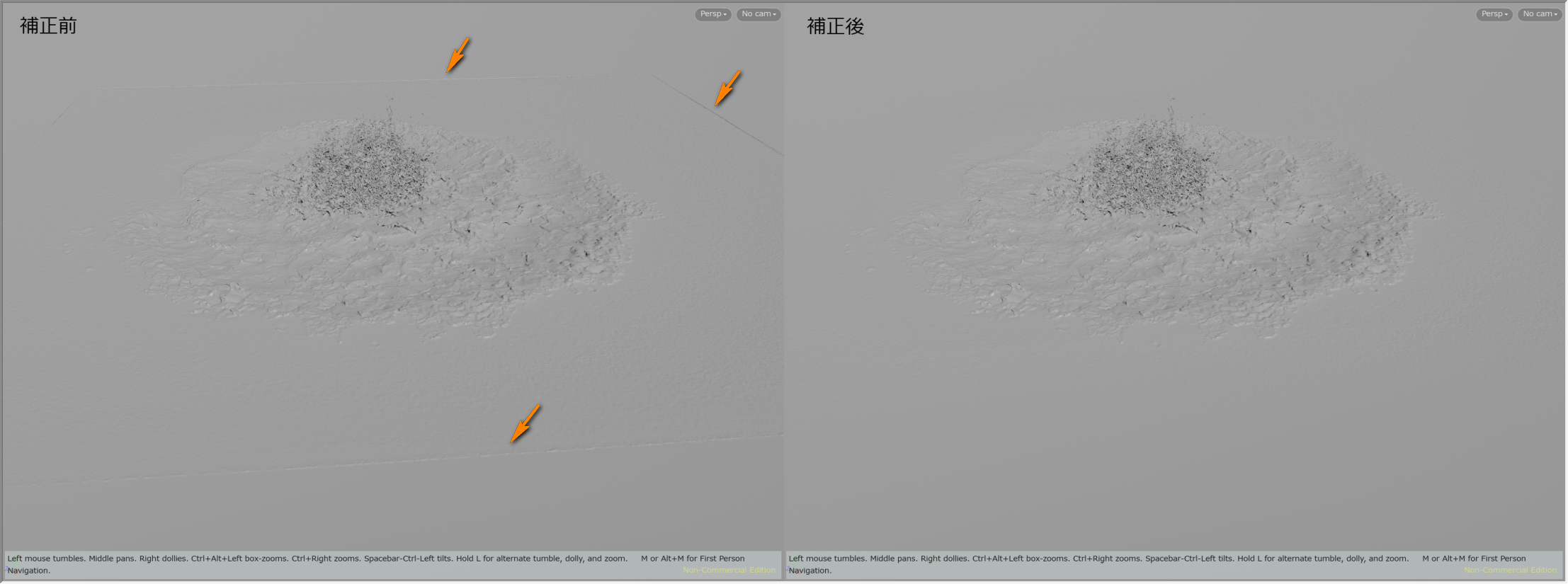
今回の制作を通して、超ヘビーなシーンに対応するためのKarmaの使用法に関する
様々な知見が得られた。

Houdini FLIP その5