
3年前に上梓しました拙書「Houdini SOP&VEX編」ですが
この度Kindle版が発売される運びとなりました。
どうぞよろしくお願いいたします。
カテゴリー別アーカイブ: houdini
Houdini Fur 3
Furのウェットシミュレーションを行ってみた。
熊の頭上から水を落下させ、水と接触したFurの形状や質感を濡れた状態に変化させる。
さらに首を振った際にファーから飛沫を出すようにしてみた。
Houdini Fur splash test from Shuichi Sakuma on Vimeo.
今回のシミュレーションには以下のソルバを使用した。
ファー:Vellum Solver
液体 :Flip Solver
飛沫 :POP Solver
濡れた質感を作るためにマントラ標準のHair Shader(VOP)をカスタマイズした。
シミュレーションと同期させ、ファーのカラー・透明度・スペキュラーを変化させた。
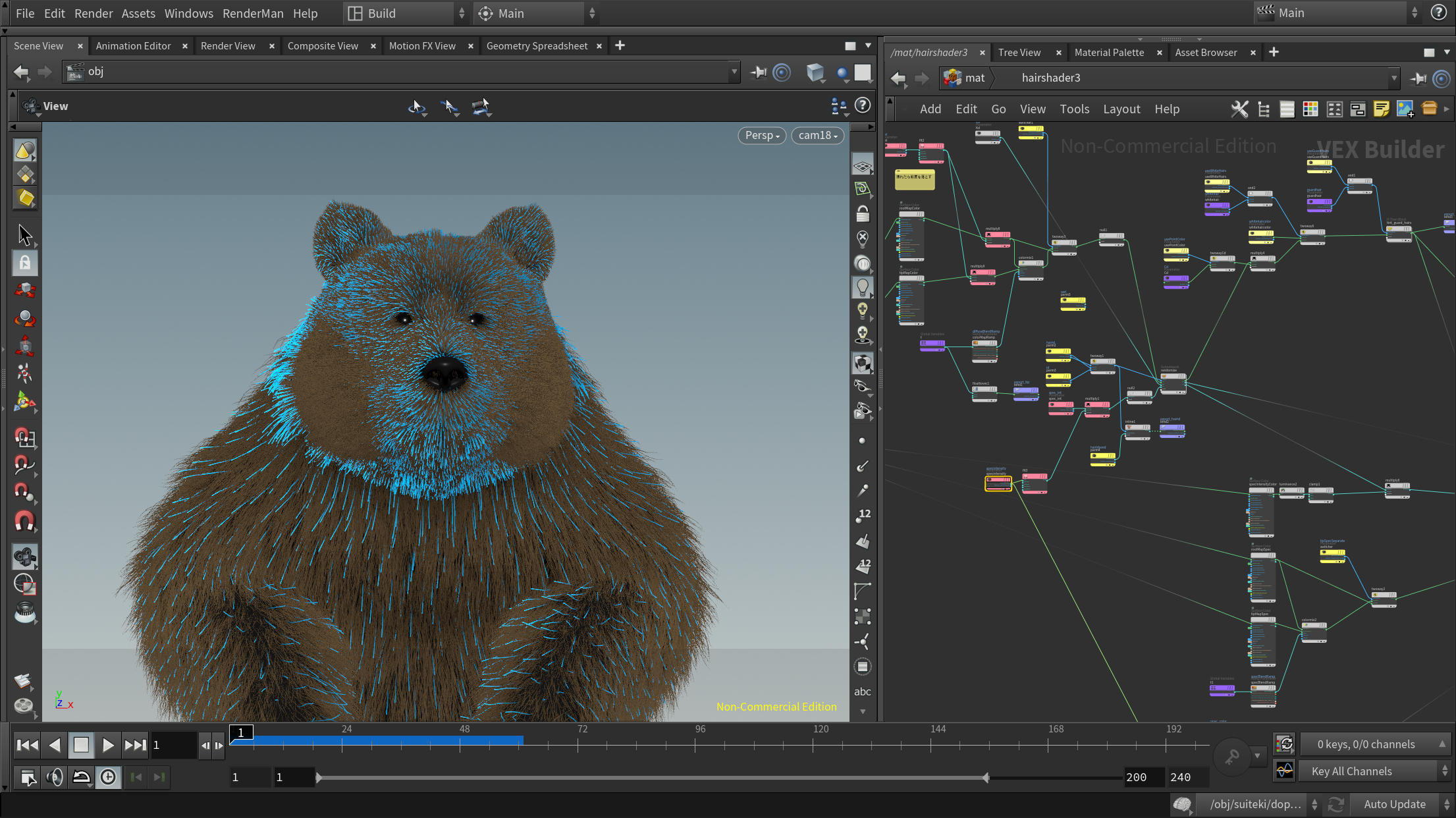
ウェット状態のファーの形状は、SOP内のVEXによって
アトリビュートを操作することで実現している。
この際、水に接触したファーを濡れた形状に瞬時に切り替えるのではなく、
数フレームかけてアニメーションしながら徐々に切り替わるようにした。
通常状態とウェット状態の比較。

一昔前の8コアのマシン(Core i7-5960X)で作業しているが
さすがにこのレベルのシミュレーションになると処理的にキツイ…。


Houdini Fur 2
Houdiniで動物のFurを作成し、アニメーションに対応させてみた。
リギング、キーフレームアニメーション、ブレンドシェイプ、マッスル(ジグル)の作業は
全てHoudiniで行った。ファーのダイナミクスを確認するため、立ち上がり後に着地する
アニメーションを作成した。
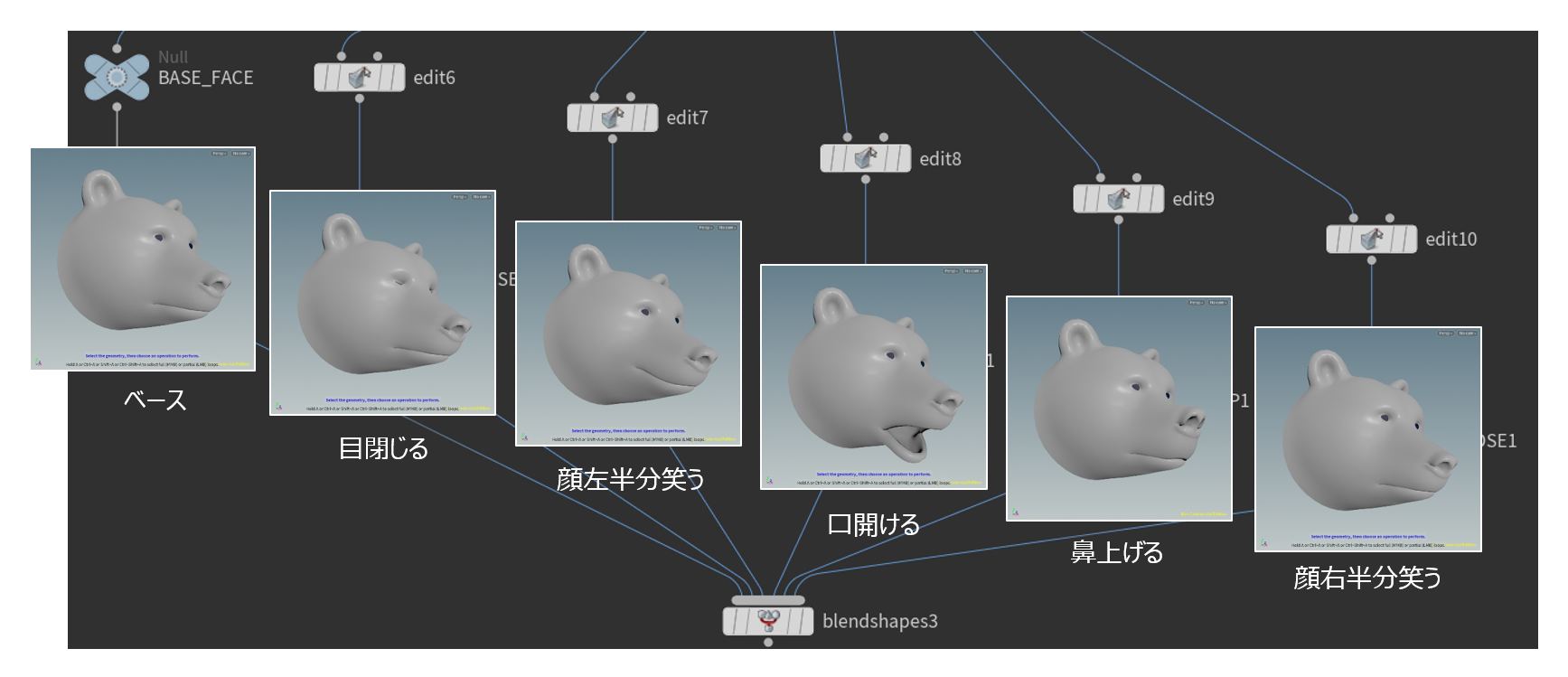
顔の表情をつけるためのブレンドシェイプはCHOPを中継してリグから駆動できるようにした。
顔のリグを動かせばそれに対応する表情が駆動するようになっている。
今回、ブレンドシェイプのターゲットはEditノードで複数モデリングした。
ターゲットをBlendShapeノードにつなげてCHOPを中継することで
リグからウェイト値を制御する仕組みになっている。
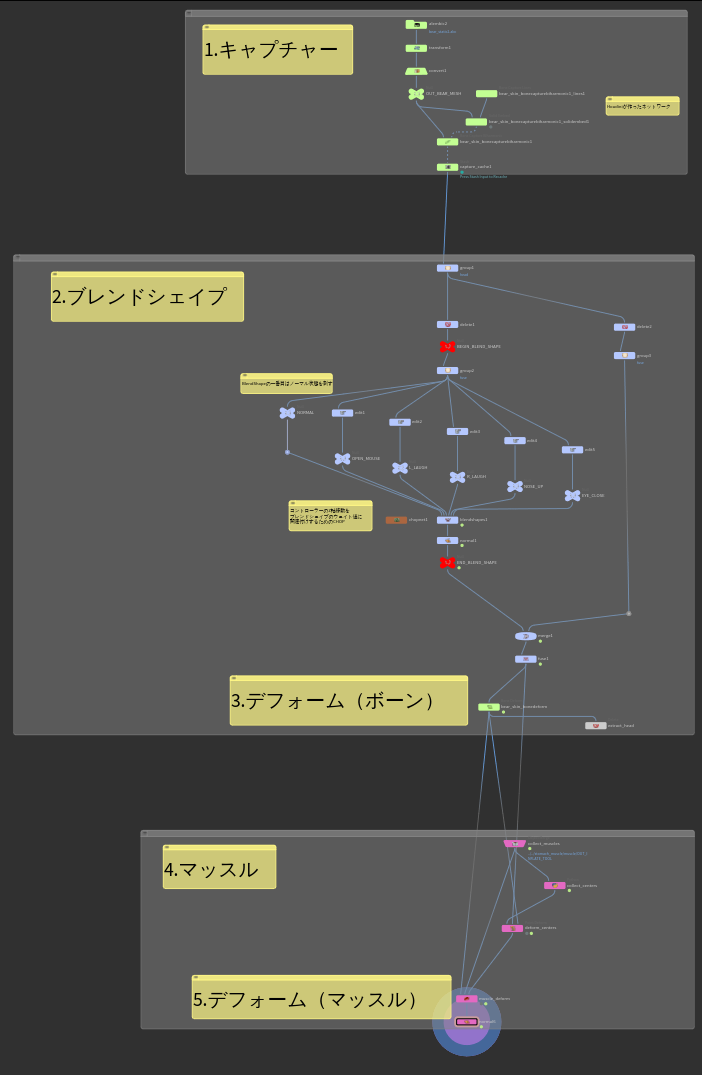
キャプチャー変形、ブレンドシェイプ変形、マッスル変形を併用する場合の
設定の順番は以下の通り。(他にもいろいろな組み方があると思う)
- キャプチャーによるウェイト設定(Mayaのスキニング操作に相当)
- ブレンドシェイプによる変形
- ボーンによる変形(1で設定したウェイト値を参照)
- マッスル設定
- マッスルによる変形


POP Wrangle備忘録
FLIPで熔解アニメーションを作ってみたが
その際に使用したPOP Wrangleノードに関する備忘録。
Houdini Melting from Shuichi Sakuma on Vimeo.
今回はDOP内のPOP Wrangleノードで熔解を制御しているが
POP WrangleノードはSOPのPoint Wrangleノードとはいくつかの相違点がある。
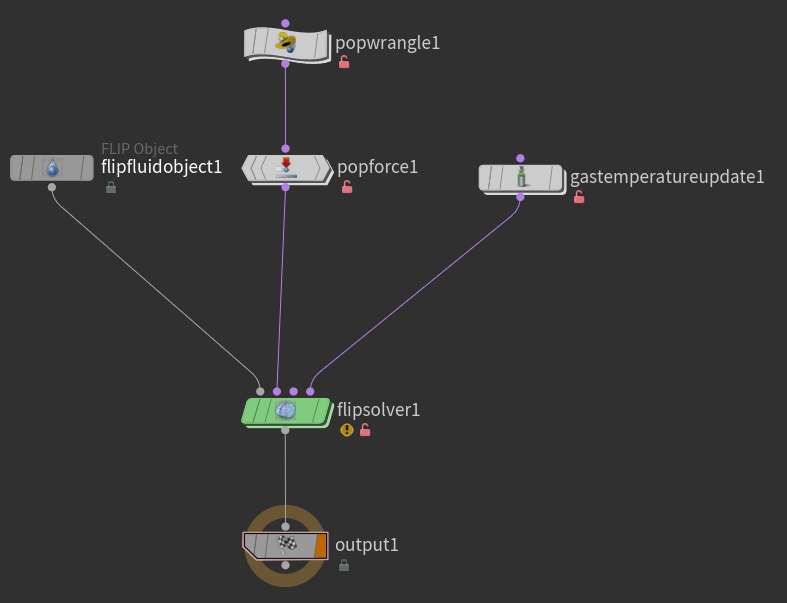
まずPOP WrangleノードにはInputsタブがある。
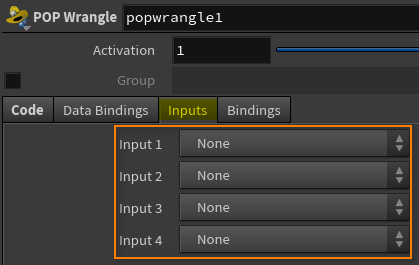
Inputsタブ内のInput1~Input4メニューは
様々なVEX関数の最初の引数になっている入力番号(0~3)に対応する。
例えば、relbbox(0,@P)と書けばInput1に設定されているジオメトリの
バウンディングボックス内の相対座標が取得できる。
Input1~Input4メニューを”First Context Geometry“~”Forth Context Geometry“に設定すると
DopNetworkノードに刺してある4つの入力からSOPジオメトリをそれぞれ取得できる。
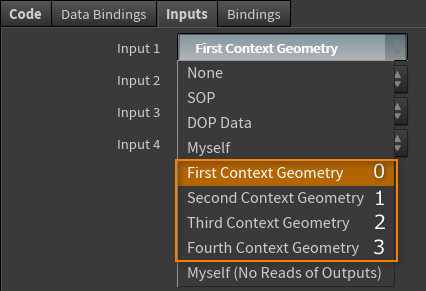

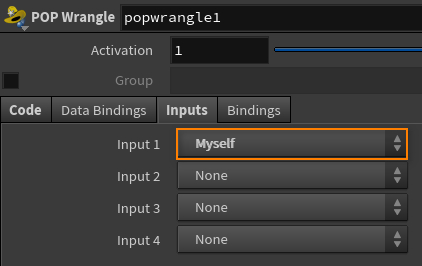
“Myself“に設定すると、これは現在処理対象となっている
DOPオブジェクト内のデータを指し示すことになる(今回はFLIPオブジェクト)。
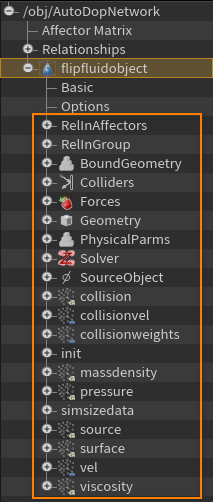
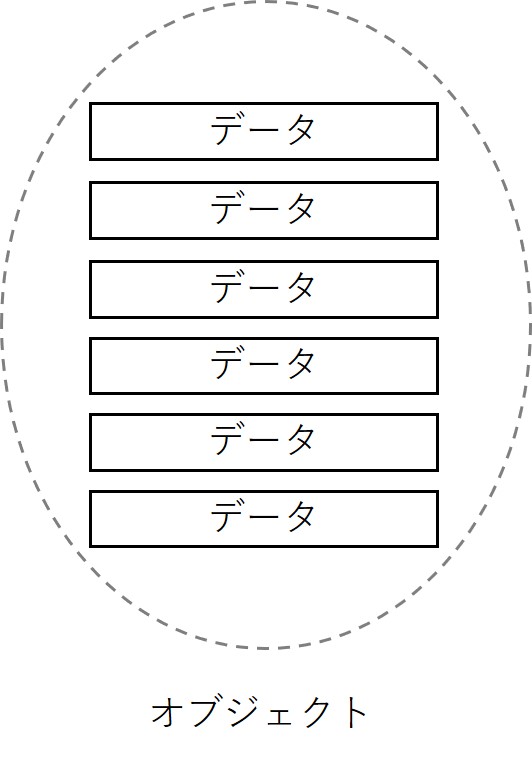
DOPオブジェクトには様々なデータが含まれているが、デフォルトでは
Pop Wrangleではオブジェクト内にあるGeometryデータ(幾何形状)を取得する。
(これはPOP WrangleではデータがGeometryに紐づけされているため)
DOP内で刻一刻と状態を変えるFLIPパーティクルを取得するために、今回はこの設定を使用した。
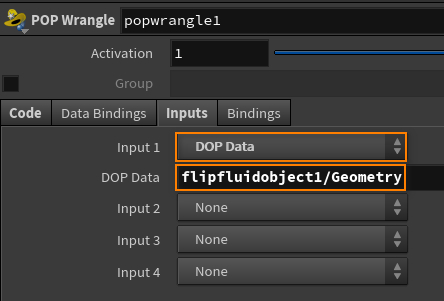
“DOP Data“に設定すると、「オブジェクト名/データ名」でオブジェクト内の
様々なデータを取得できる。今回の場合「flipfluidobject1/Geometry」でMyselfに設定した時と
同じ結果になった。
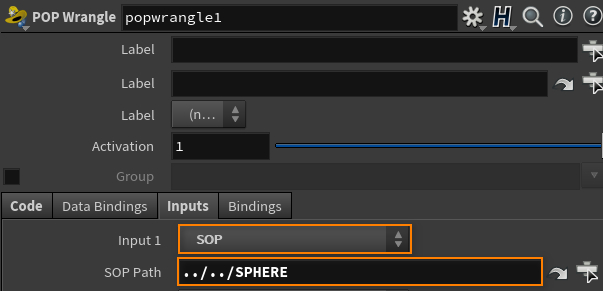
“SOP“に設定するとパスを直接指定することでSOPジオメトリを取得できる。
DOPの理解を困難にしているのは
「オブジェクト」という概念だと思うので
そちらについてはあらためてブログで取り上げてみたい。
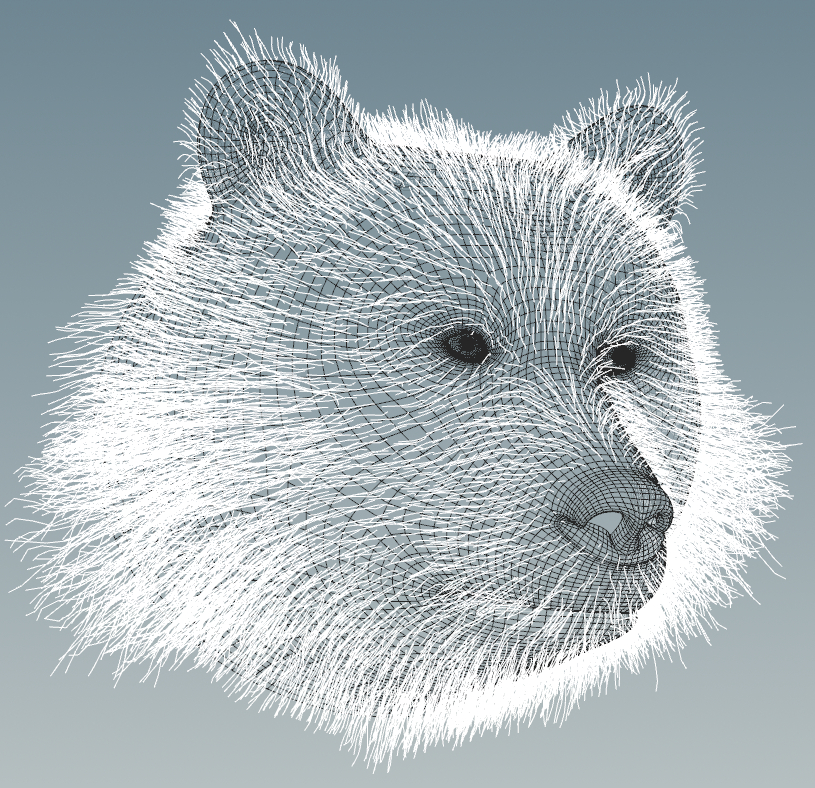
Houdini Fur
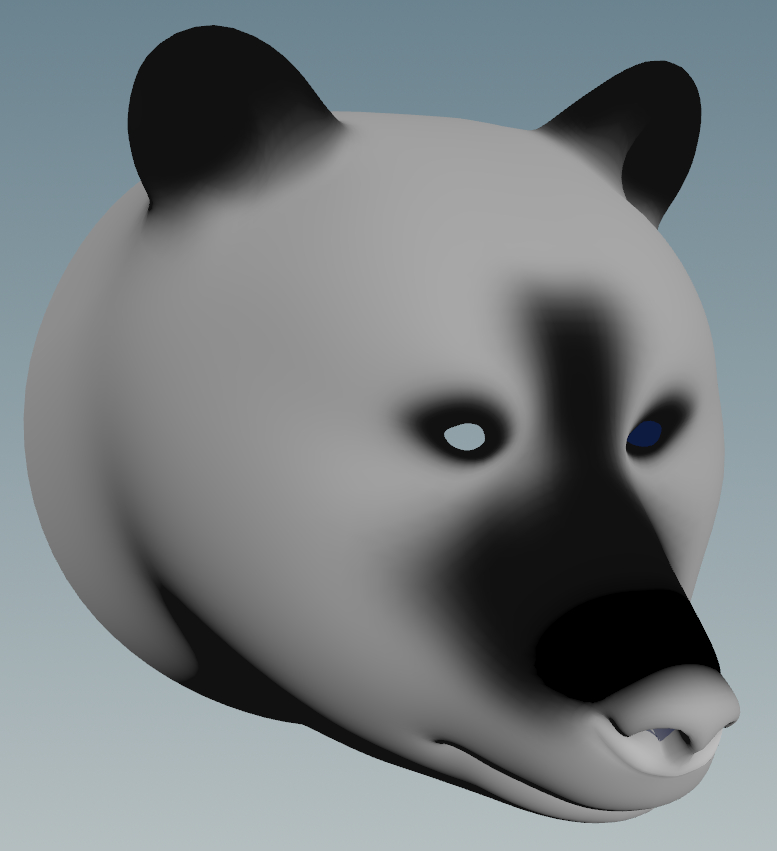
Houdiniで動物頭部のファーを作ってみた。
Houdini Fur Groom Wip01 from Shuichi Sakuma on Vimeo.
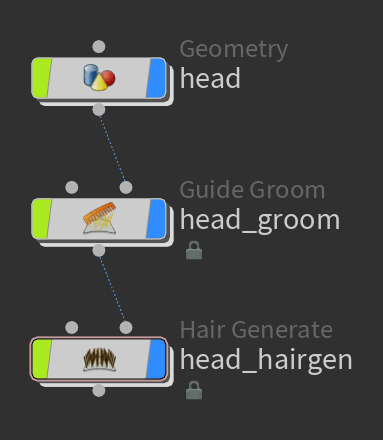
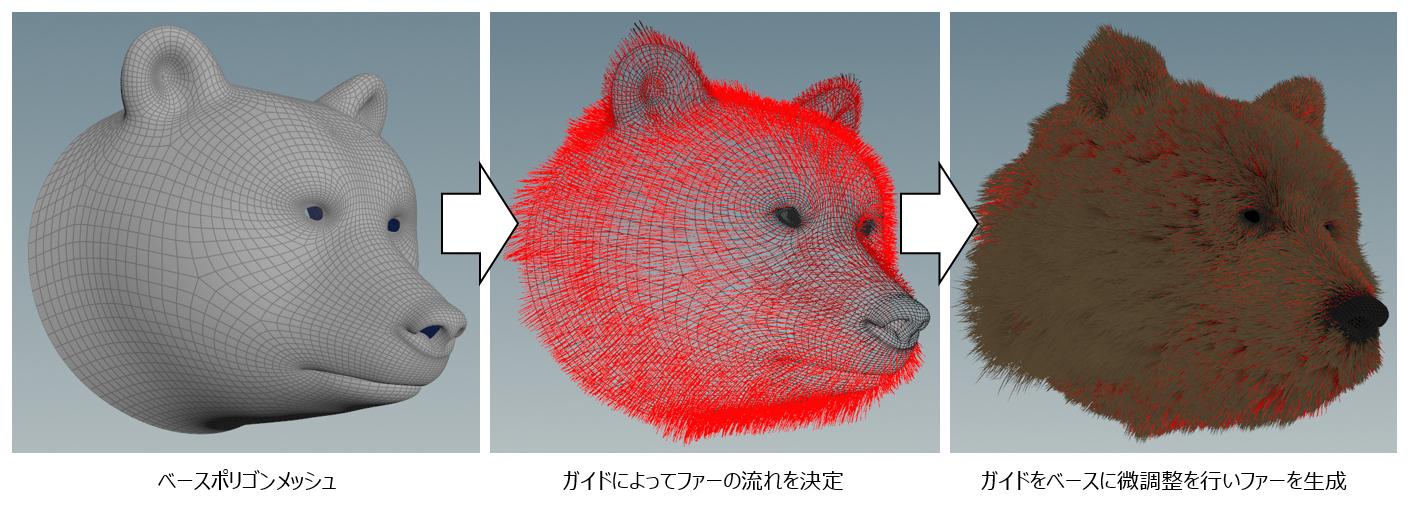
シェルフからファーをセットアップすると、以下の三段階に処理が分かれる。
- 皮膚メッシュ(Geometryノード)
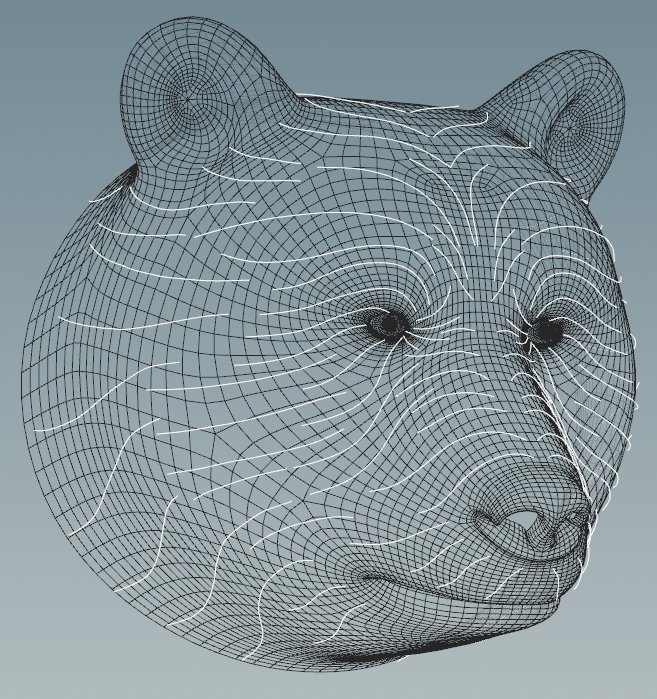
- ガイドカーブ(Guide Groomノード)
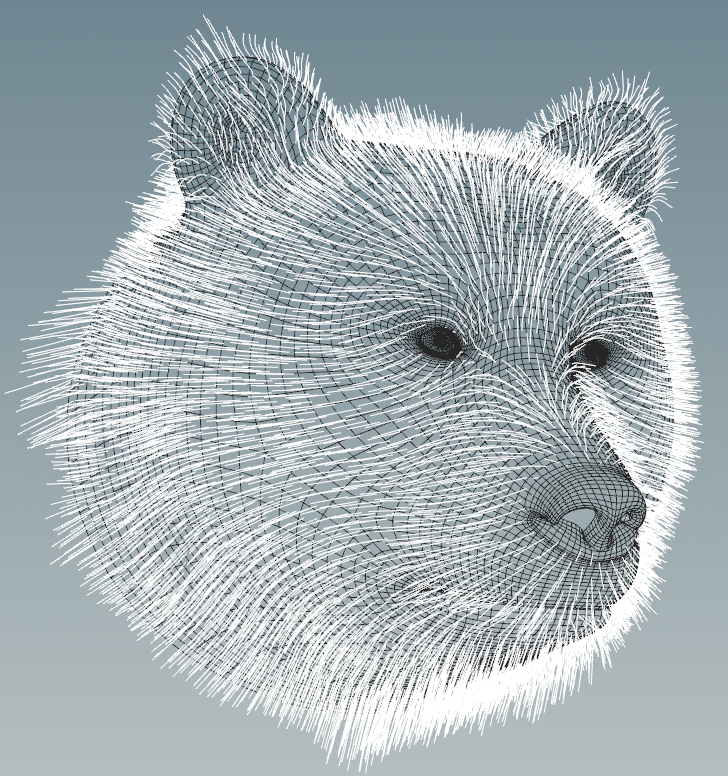
- ファー生成(Hair Generateノード)
これにより皮膚メッシュ上にガイドカーブが作成され、
ガイドカーブによってファーの流れを決定し、
レンダリング時にプロシージャルにファーを生成するフローが作られる。
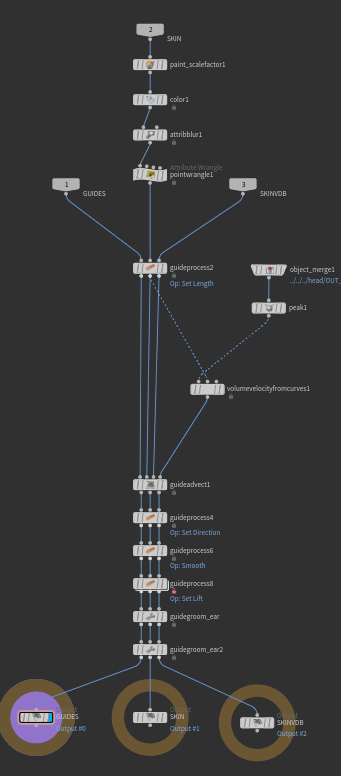
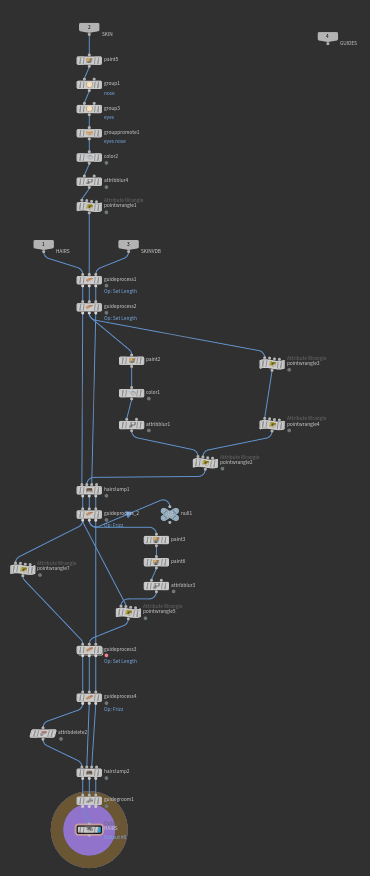
以下Guide Groomノード、Hair Generateノードの中身。
(両ノードとも最初は空の状態から開始)
今回はブラシ、カーブ、ペイント、プロシージャルな変形、VEXをフル活用して
頭部ファーの複雑な流れを作った。以下はその概要。
ブラシによるグルーミングは局所的なファーの流れを形成したり
ファーの隙間を埋めるために使用した。
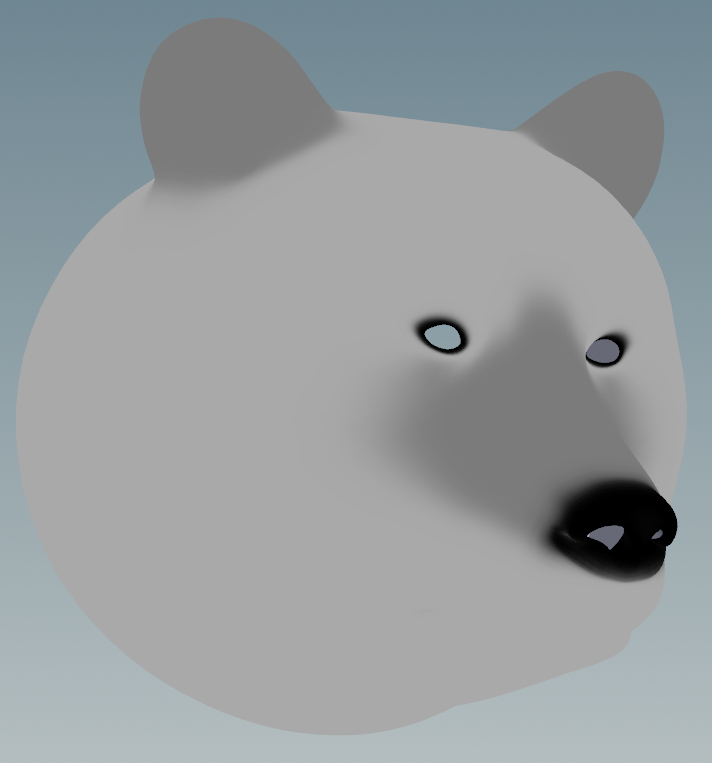
ペイントは顔の部位ごとにファーの長さ・縮れ量・クランプ半径・クランプ強度を
コントロールするために使用し、今回は様々なパターンを描いた。
カーブは顔面のファーの流れを定義するために使用。
カーブからvelフィールドを作成し、ファーをフィールドに沿って移流させた。
プロシージャルな変形は、ファーに対して一律に長さを調整したり
クランプや縮れを形成するために使用した。
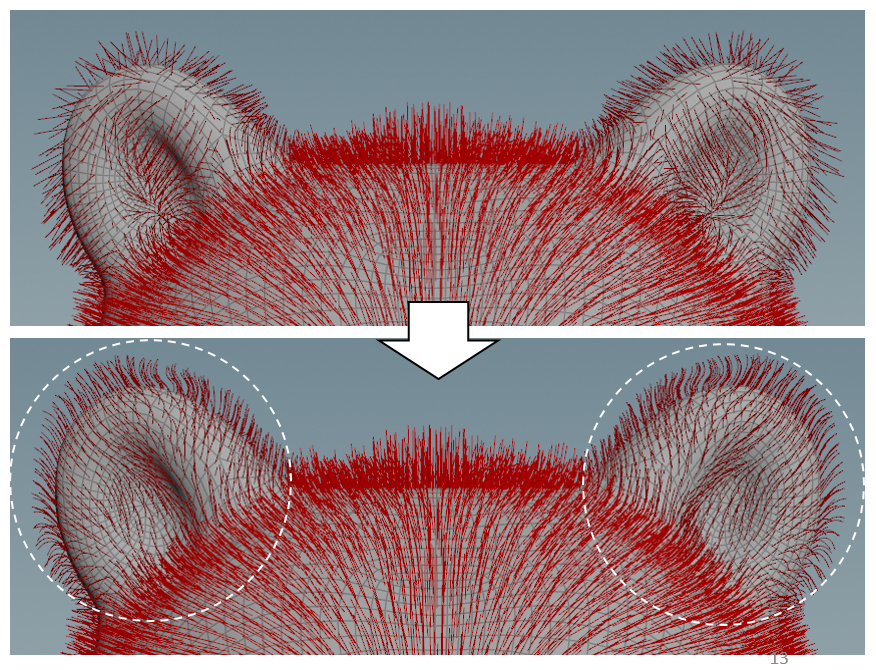
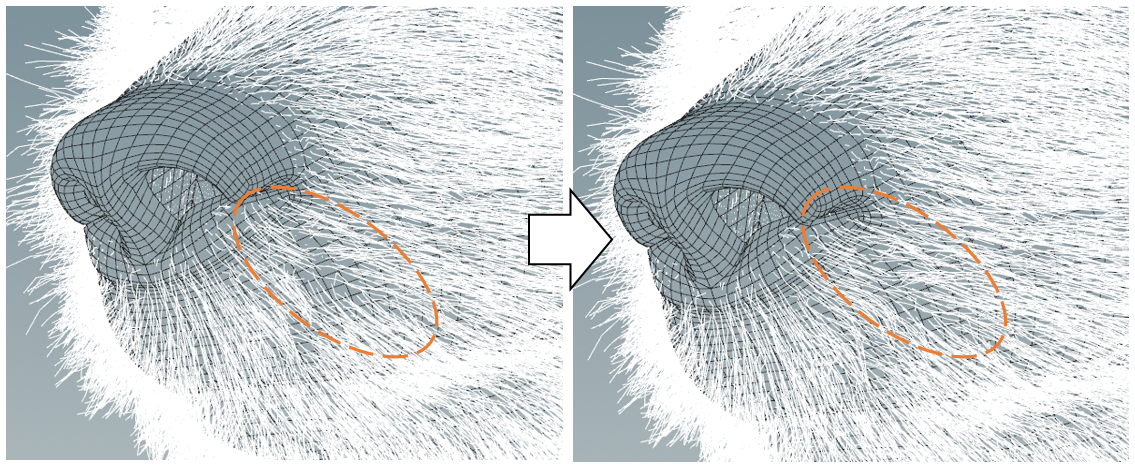
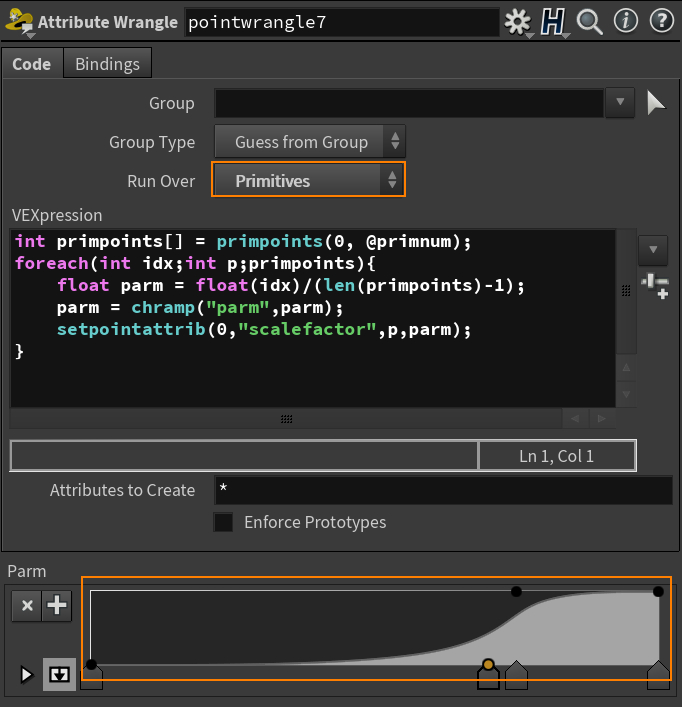
VEXはファーの特定部分(図では頬の部分)の毛先付近だけに変形処理を追加する際に使用した。
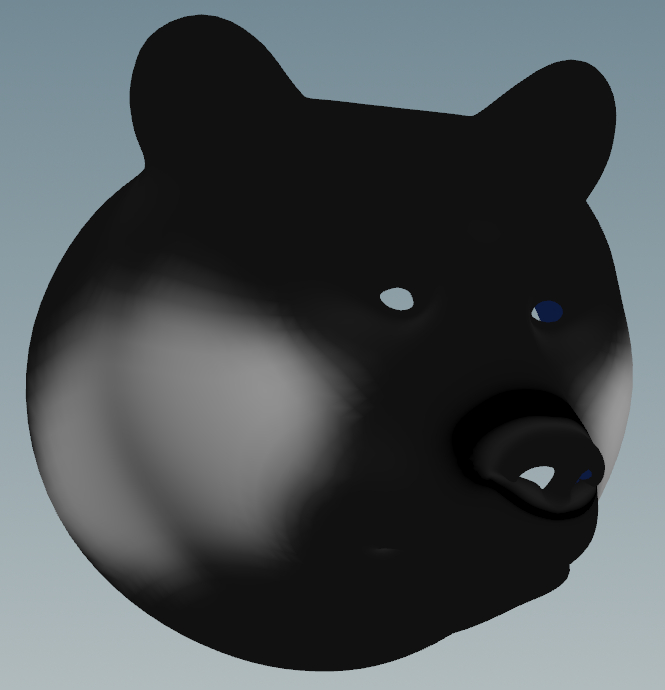
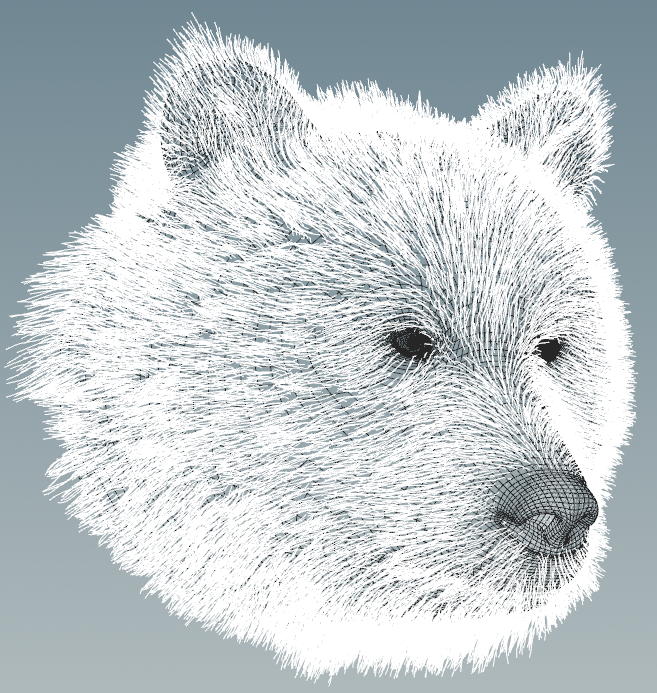
レンダリング結果


Houdini 戦車アニメーション
以前Houdiniで作成した戦車モデルにアニメーションを設定してみた。
今回、戦車自体はOBJレベルでキーフレームアニメーションで動かし、
キャタピラと車輪の動きはSOPレベルでVEXを使ってコントロールしている。
拙著「Houdini SOP&VEX編」に記載しているキャタピラを動かすためのVEXを
凹凸地形にも対応できるように今回改良した。
戦車は旋回の方向によって左右のキャタピラと車輪の回転を
逆にする必要があるが、それにも対応できるようにした。
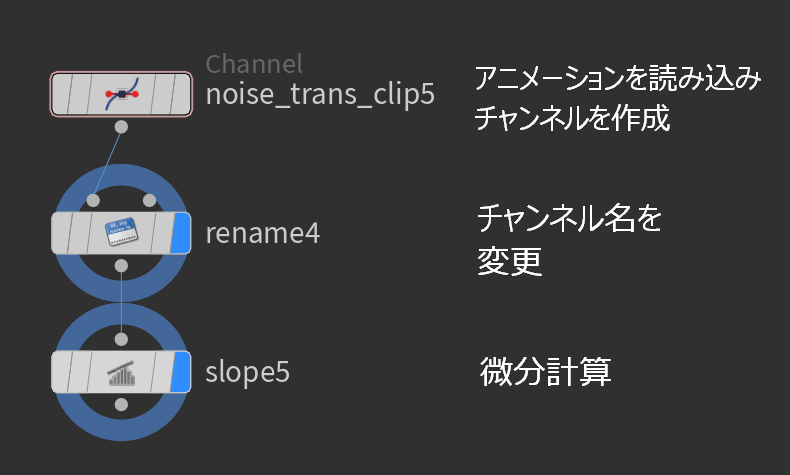
このためにCHOPで微分(差分)計算を行った。
具体的には、OBJレベルで作成した戦車の回転アニメーションをCHOPに読み込み
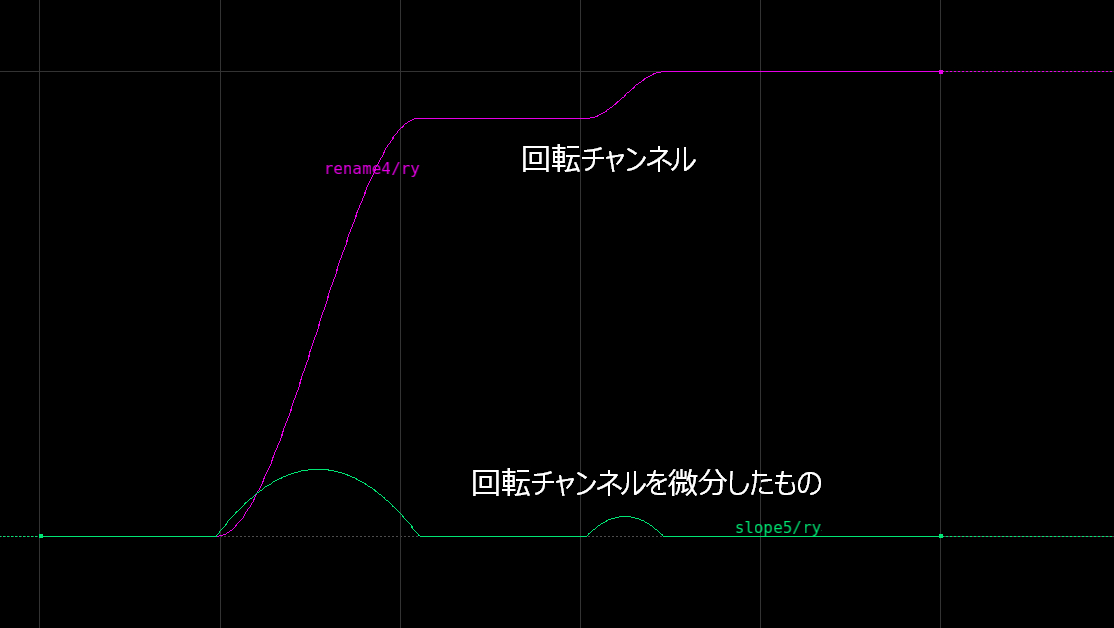
Slope CHOPでチャンネルカーブに対して微分操作を行った。
これによりチャンネルカーブの傾き情報(速度)が得られるため
「傾きがプラスだったら右旋回中、マイナスだったら左旋回中」のようにVEXの中で判定し、
適切な方向にキャタピラと車輪を回転させることができるようになる。
戦車の前進・後退の判定にもSlope CHOPを使用した。
(ちなみに、微分の逆の積分操作はArea CHOP)
テクスチャーはSubstance Painterを使って作成し、
最後にPyroで土煙を加えて完成。
Houdini カメラ振動
先日作成したロボットウォークアニメーションに足の接地と同期するカメラの振動を加えてみた。
以下簡単な手順
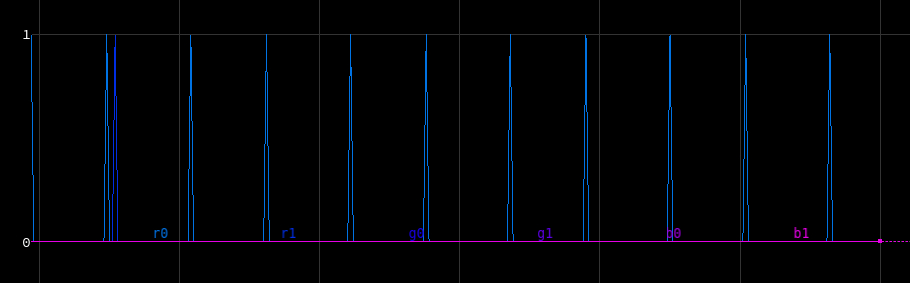
1.ロボットの足裏の接地タイミングに合わせてCHOP内でパルス波を作成。パルス波を作成するために、足裏にポイントを一つ仕込んでおきSOP内でそのポイントが接地した最初のタイミングで赤に変わるようにしておく。そしてCHOP内のGeometryノードによってその赤情報をチャンネルに変換。
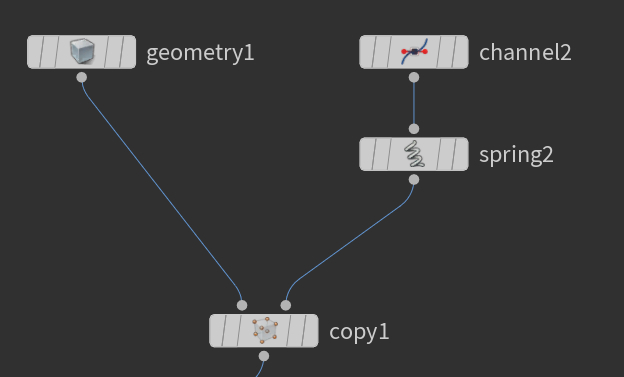
2.CHOP内のCopyノードを使って、パルス波をトリガーにして振動しながら徐々に減衰していくチャンネルをコピー。

3.Channel Wrangle内のVEXによってチャンネル形状を加工

4.カメラのtyパラメーターからchop関数を使って、チャンネルを参照
CHOPコンテキストのCopyノードはSOPのものとは使用方法が根本的に異なる。左側の入力はパルス波のようなトリガーシグナル、右側の入力はトリガーシグナルに応じてコピーされるチャンネルになっている。
今回初めてChannel Wrangleを使用したが、いつ追加されたのだろう?
WrangleによってCHOP内でもVEXが使用できるため以前よりもチャンネルの加工が
直感的にできるようなった。
Houdiniのアニメーション作業
Houdiniでシンプルなモデルを作って、リギング作業→キーフレーム作業→エフェクト作業を
通してやってみた。
一般的にHoudiniというとエフェクト分野に強いイメージがあるが
通常のキーフレームを主体とするアニメーション作業も十分やりやすい。
またHoudiniでアニメーション作業を行った場合には、シームレスに
そのあとのエフェクト作業につなげられるというメリットもある。
Houdini カールノイズ関数について
Houdiniにおけるカールノイズについて。
カールノイズを使用したサンプルファイルでよく見かけるのは
「CurlNoiseノード」を使用した以下のようなVOPネットワーク。
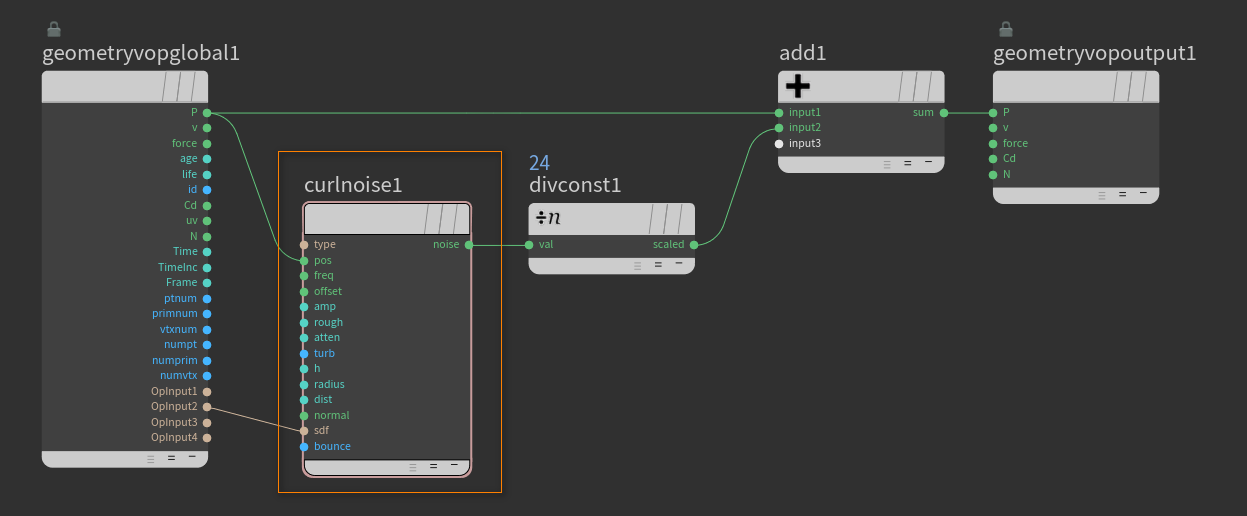
CurlNoiseノードが返すベクトルは湧き出しや吸い込みがない(発散がない)流れ場を構成するが、
CurlNoiseノードにはSDF(Signed Distance Field)が接続できるようになっているので
ボリュームとの衝突を回避させることもできる。
CurlNoiseのCurlとはベクトル解析におけるベクトル場における回転を意味する。
ベクトル場に対してこの「回転」という演算を施せば、ある地点の渦度を表すベクトル(回転軸+回転の大きさ)が手に入る。また、ベクトル解析の基本公式により、回転演算によって求めたベクトル場には発散がないことが保証される。(この「発散がない」ことによってパーティクルを「いい感じ」に流すことができる)
しかし実は、このVOPノードに1対1で対応するVEX関数はヘルプには記載されていない。
ヘルプに記載されている以下の2つのカールノイズ関数(curlnoise関数、curlxnoise関数)は
位置に応じたカールノイズは生成できるが、衝突用のSDFボリュームを渡すための引数がない。
vector curlnoise(vector xyz) vector curlnoise(vector4 xyzt)
しかし、以下のようにVEXコードの先頭でvoplib.hをインクルードすることで
CurlNoiseノードに対応するVEX関数(vop_curlNoiseVV関数)を使用することができるようになる。これによりVEX関数だけで障害物ボリュームとの衝突を避けつつ、発散がない流れ場に沿ってポイントを移流させるアニメーションが可能となる。
#include <voplib.h>
v@curlnoise = vop_curlNoiseVV(
@P, 1*{1,1,1}/*周波数*/, {0,0,0}/*オフセット*/, {0,0,0}/*法線ベクトル(0の場合はSDFからgradient(勾配)を自動的に計算)*/,
"pnoise"/*ノイズタイプ(Perlin Noise)*/, @OpInput2/*衝突用のSDFボリューム*/,
3/*乱流*/, 1/*衝突の際に速度の反転*/,
0.3/*振幅*/, 0.5/*粗さ*/, 1/*減衰*/,
0/*サーフェイスまでの距離(衝突ボリュームを設定しない際に有効)*/,
0.1/*衝突回避処理を発動する際のサーフェイスからの距離*/,
0.0001/*ステップサイズ*/);
@v = {0,0.2,0}+v@curlnoise;// 上昇するよう+Y軸方向に指向性を与えて速度とする
@v = clamp(@v,-0.4,0.4);// 速度の大きさに制限をかける
@P += @v*@TimeInc;// 速度から位置を求める積分計算
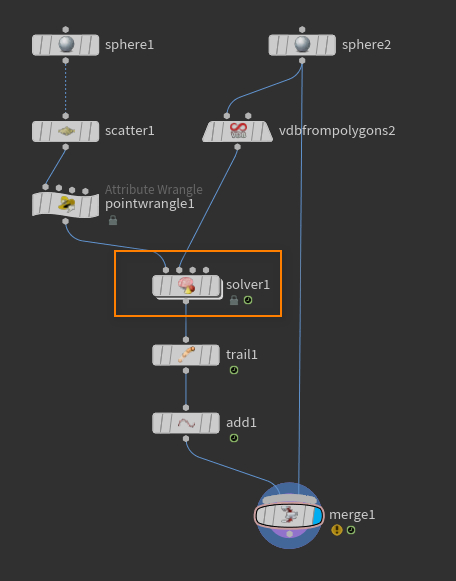
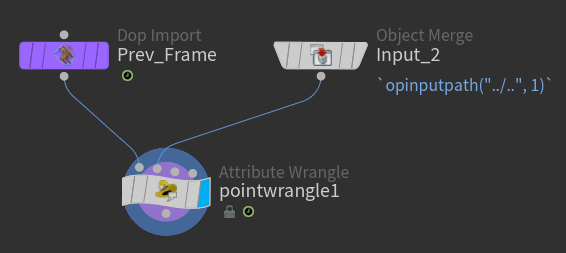
実際のVEXは以下のようにSolver内のWrangleノードに書いてやればよい。
vop_curlNoiseVV関数は、2007年のRobert Bridson氏の論文
「Curl-Noise for Procedural Fluid Flow」を忠実に実装したものとなっている。
(https://www.cs.ubc.ca/~rbridson/docs/bridson-siggraph2007-curlnoise.pdf)
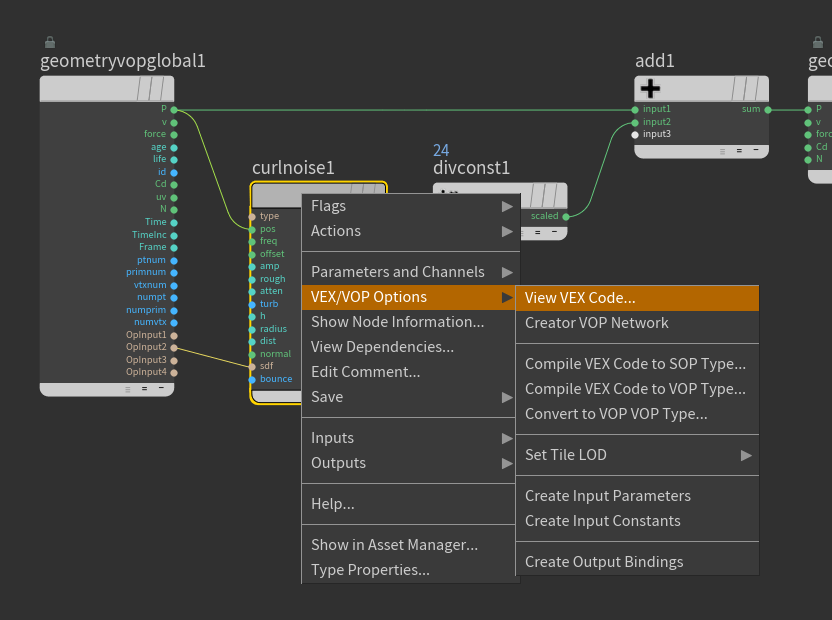
ちなみに、CurlNoise VOPノードを右クリックして「View VEX Code」を選択すると
VOPが生成するソースコードを見ることができる。
そこでvop_curlNoiseVV関数の名称が確認できる。
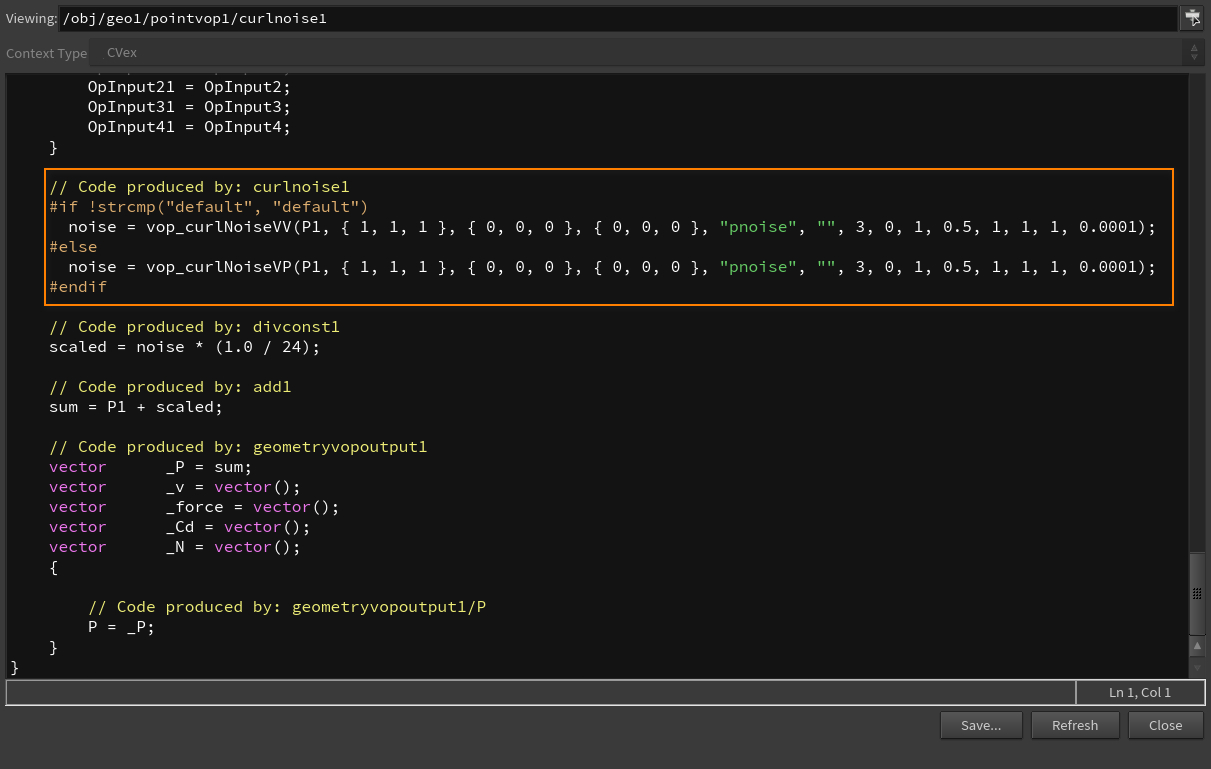
vop_curlNoise関数は2つあるが、それぞれ以下のような役割。
vop_curlNoiseVV関数 → 最初の引数にvector(位置)を渡す。vectorが返る
vop_curlNoiseVP関数 → 最初の引数にvector4(位置+時間)を渡す。vectorが返る
【まとめ】カールノイズを使用するメリット
1. VEX関数のみで吸い込みや湧き出しのないベクトル場が作成できる
2. SDFボリュームを関数の引数に設定すれば、障害物との衝突を回避しながらの移流ができる
3. SOPだけで計算が完結するため処理が軽い
Windowsではvoplib.hは以下のパスにある。(**はバージョン)
(C:\Program Files\Side Effects Software\Houdini 17..***\houdini\vex\include)
Houdini 煙いろいろ
Houdiniでいろいろなタイプのスモークを作ってみた。
スモークのvelフィールドのベースとなるのは、
パーティクルの速度ベクトル(@v)や、
シミュレーション後のRBDの速度ベクトルをVDBに変換したもの(@collisionvel)
パーティクルの速度ベクトルはDOP内でGas Particles To Field、
VDBはVolume Sourceのcollisionプリセットで読み込んだ。
●ドラゴンブレススモーク
パーティクル速度ベース
Houdini dragon fire wip v1 from shuichi sakuma on Vimeo.
●ビル崩落スモーク
RBDの速度ボリュームベース
Houdini Buiding destruction wip from shuichi sakuma on Vimeo.
●放射状スモーク
拙書「Houdini SOP&VEX編」の花火(8-7)がベース
パーティクル速度ベース
Houdini radial smoke test from shuichi sakuma on Vimeo.
●地割れスモーク
RBDの速度ボリュームベース
Houdini ground smoke test from shuichi sakuma on Vimeo.
●爆発スモーク
RBDの速度ボリュームベース