先日作成したロボットウォークアニメーションに足の接地と同期するカメラの振動を加えてみた。
以下簡単な手順
1.ロボットの足裏の接地タイミングに合わせてCHOP内でパルス波を作成。パルス波を作成するために、足裏にポイントを一つ仕込んでおきSOP内でそのポイントが接地した最初のタイミングで赤に変わるようにしておく。そしてCHOP内のGeometryノードによってその赤情報をチャンネルに変換。
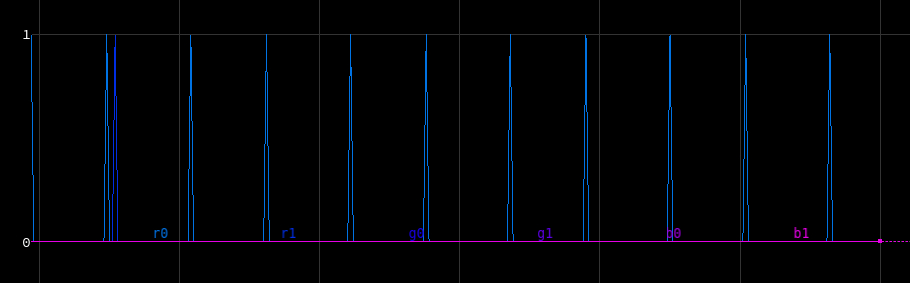
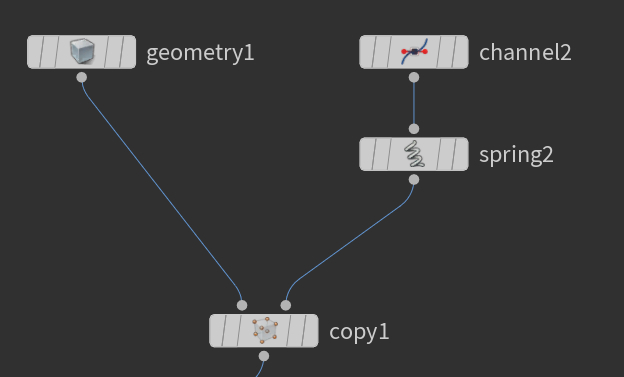
2.CHOP内のCopyノードを使って、パルス波をトリガーにして振動しながら徐々に減衰していくチャンネルをコピー。

3.Channel Wrangle内のVEXによってチャンネル形状を加工

4.カメラのtyパラメーターからchop関数を使って、チャンネルを参照
CHOPコンテキストのCopyノードはSOPのものとは使用方法が根本的に異なる。左側の入力はパルス波のようなトリガーシグナル、右側の入力はトリガーシグナルに応じてコピーされるチャンネルになっている。
今回初めてChannel Wrangleを使用したが、いつ追加されたのだろう?
WrangleによってCHOP内でもVEXが使用できるため以前よりもチャンネルの加工が
直感的にできるようなった。