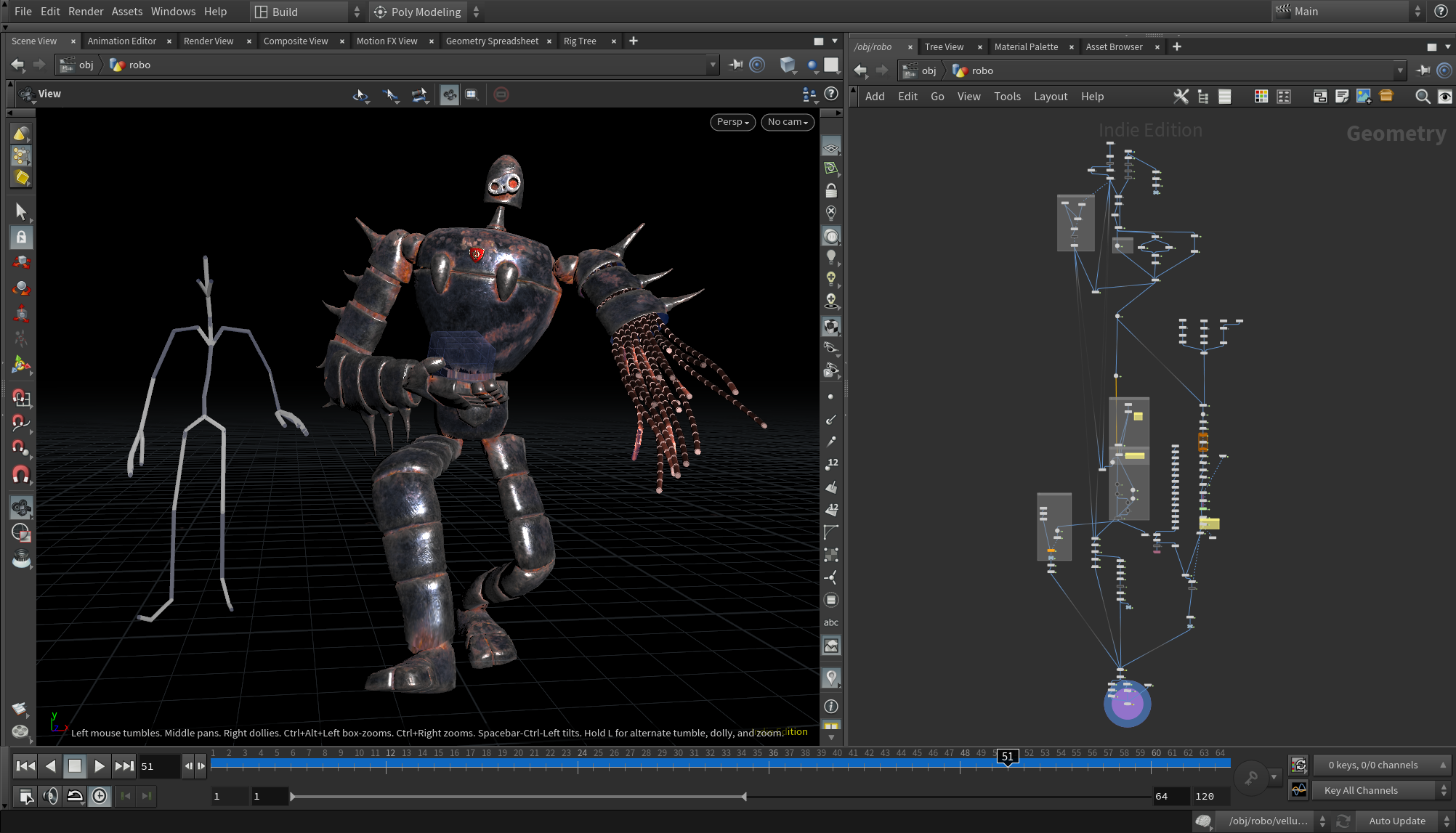
Houdini18.5 のKineFXを使って、以前Houdiniでモデリングしたロボットを
動かしてみた。
モーションはmixamo.comからダウンロードしたもの。
ロボットの体型に合わせてモーションの調整を行い、
Vellumで腕のインナーチューブのシミュレーションを行った。
足の接地にはStabilizeJointノード、関節の曲がり角度制限にはFullBodyIKConfFgureJointsノード、重心制御にはIKChainノード、腕のモーション修正にはRigPoseノードを使用した。
今回mixamoのジョイント階層とロボットの階層構造がかなり異なるため、
モーションを移し替えた際にロボットの膝の振動が発生してしまった。
そのためにRigAttributeWrangleでIKのTwist位置を調整するVEXを書いた。
さらにAttachControlGeometryノードを使用し、Vellumシミュレーションのベースとなる
チューブの初期位置を確定した。
KineFXを触ってみた所感だが、SOP内で階層構造を扱うための行列計算が格段にやり易くなった。
数年前に書籍「Houdini SOP&VEX編」を書いているときは、SOP内で階層構造を実現するための
行列計算が大変だった記憶がある。
また、KineFXとVellumの親和性はかなり高そうだ。
そういえば、SideFXのHouidni18.5のデモ動画にも
このタイプのロボットが出ていたな~。流行ってるのかな?