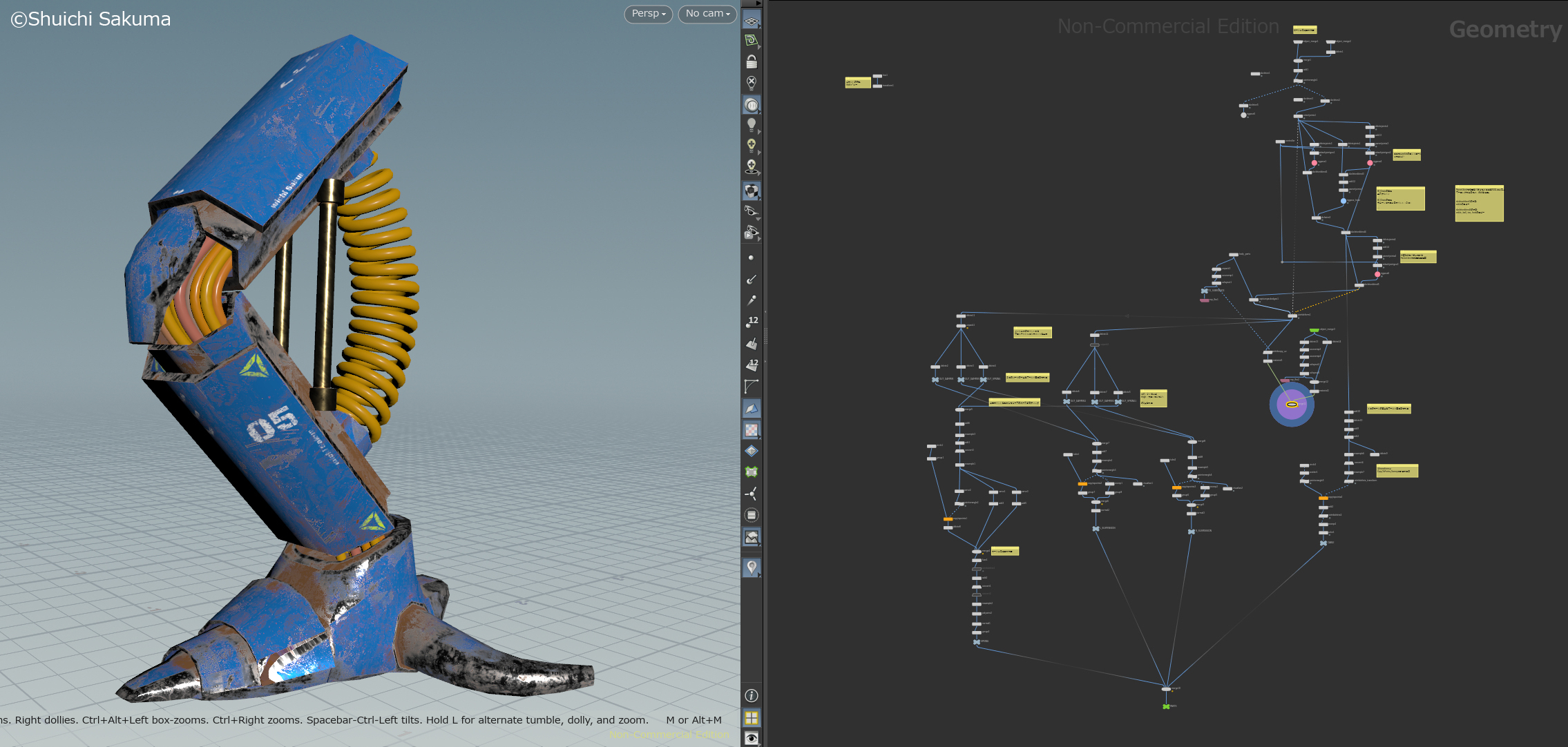
今回、HoudiniにKineFXが実装される以前に作成したロボットのリグを
KineFXにコンバートしてみた。
以前のHoudiniでは、リグはObjectレベルでBoneノードをベースに実装していた。
仕組みとしてはBoneノードの階層に対してCHOP内でIKチェーンを設定して
別階層のNullノードからIKチェーンのゴールをコントロールするやり方をとっていた。
この場合、ロボットのパーツはそれぞれBoneノードにペアレントする必要があった。
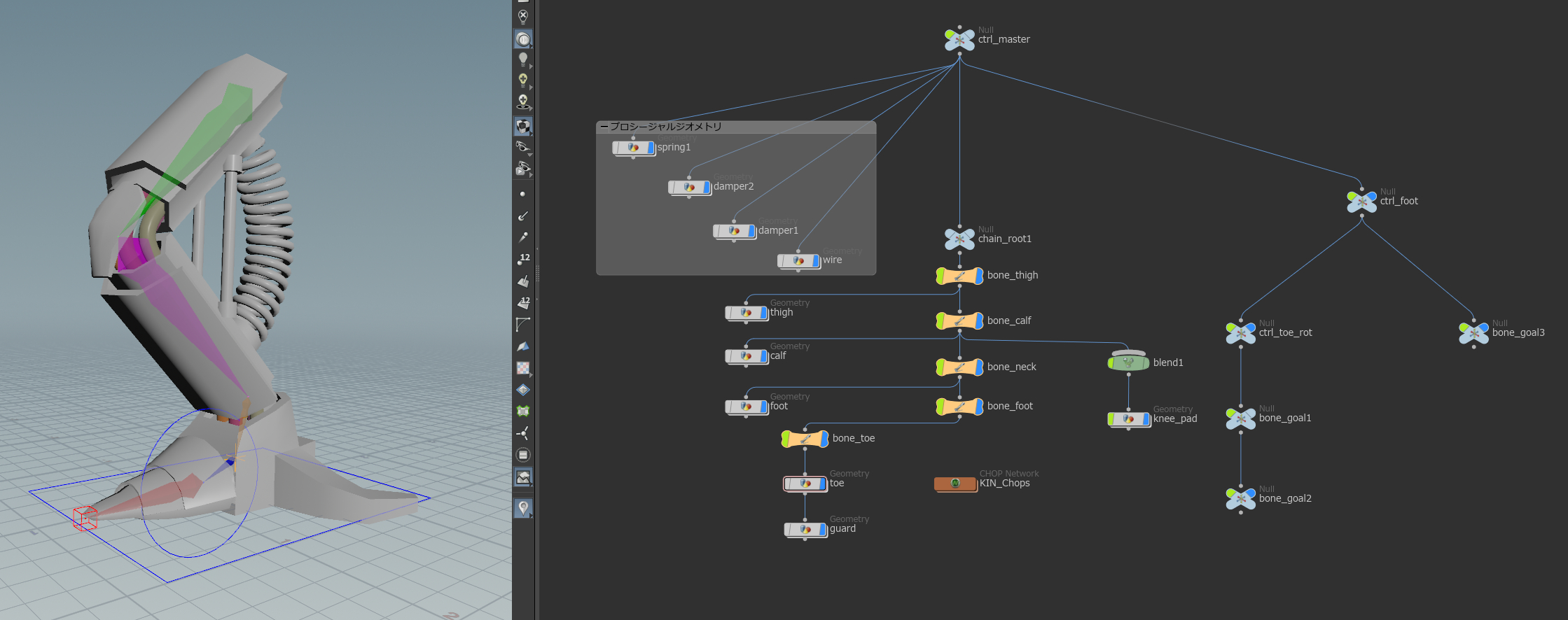
それに対し、KineFXが実装された今ではSOP内でそれらを全て実装できるようになった。
つまり、骨に相当するジョイント階層の作成や、IKチェーンの作成、リギング、
ジョイントに対するパーツのペアレント化などは全てSOP内で行うことができる。
また、KineFXはプロシージャルに階層内の親子関係の組み換えも可能なので、
いわゆる足の「リバースフット」の実装も比較的簡単に行うことができた。
KineFX作業動画
もう今後Boneノードを使用することはないだろうな~
(Houdini19ではObjectレベルでTabキーを押して”bone”と入力するとまだ作成できます)