先日Houdiniで作成した破壊シーンのバージョン2の動画をアップ。
カメラワークを一部修正。
レンダリング中はマシンの発熱がすごい。
デロンギのオイルヒーターくらいの温度になるので、
レンダリング中はPCが暖房器具になる。
作業PCは天板から放熱するエアフローのため
寒い日にはエルがよくPCに乗って暖を取っている。


先日Houdiniで作成した破壊シーンのバージョン2の動画をアップ。
カメラワークを一部修正。
レンダリング中はマシンの発熱がすごい。
デロンギのオイルヒーターくらいの温度になるので、
レンダリング中はPCが暖房器具になる。
作業PCは天板から放熱するエアフローのため
寒い日にはエルがよくPCに乗って暖を取っている。
今回、映画「トランスフォーマー3」のあるシーンを参考にして
ヘビ型のロボットを高層ビルに巻き付かせてビルをなぎ倒すシーンを作ってみた。
モデリング、アニメーション、シミュレーション、レンダリングはすべてHoudiniで行った。
コンポジットはNuke。
ヘビ型ロボット(劇中では”Driller”という名前)の基本的な動きはVEXでプログラム制御し、
さらにロボットの微震のためにVellumも使用した。
高層ビルのアセットは自分が書いたHoudini本(SOP&VEX編)を見ながら作成した。
今回のシーンはデータサイズが巨大だったため、キャッシュサイズだけでも3T以上となった。
データの規模的には以前作成した水のキャラクターを超えたと思う。
レンダリングはKarma XPUを今回始めて使用。
ベータ版ということで一部未実装な部分はあるが、今回のシーンでは問題なく使用できた。
使用感としては「とにかく速い!」の一言。
Karma XPUは数秒で最終的な絵に近い状態で確認できるため、作業効率の向上につながった。
ただ、レンダリングフレームによってはGPU側のメモリ割り当てのエラーが出て
自動的にCPUのみのレンダリングとなった。
これは使用しているグラボのメモリが8GBしかないため、GPU側のメモリに必要なデータが
全て転送できなかったためだと思われる。

今回はHoudiniのRBD、Vellum、POP、Pyroをフル活用して作ったが、
一昔前に比べてダイナミクス周りは格段に使いやすくなっている印象を受けた。
また今回の制作では「いかに壊すか」よりも「いかに壊さないか」に時間を費やした。
(そもそもHoudiniを使えば「壊す」ことは簡単にできるので…)
▼制作環境
CPU : Ryzen Threadripper 3970X(32コア)
GPU : GeForce RTX 3070
メモリ : 128GB
ストレージ : 12TB


ちなみに以下の動画は同じテーマで5年前にチャレンジしたもの。
5年間でそれなりに進歩はしたと思う。
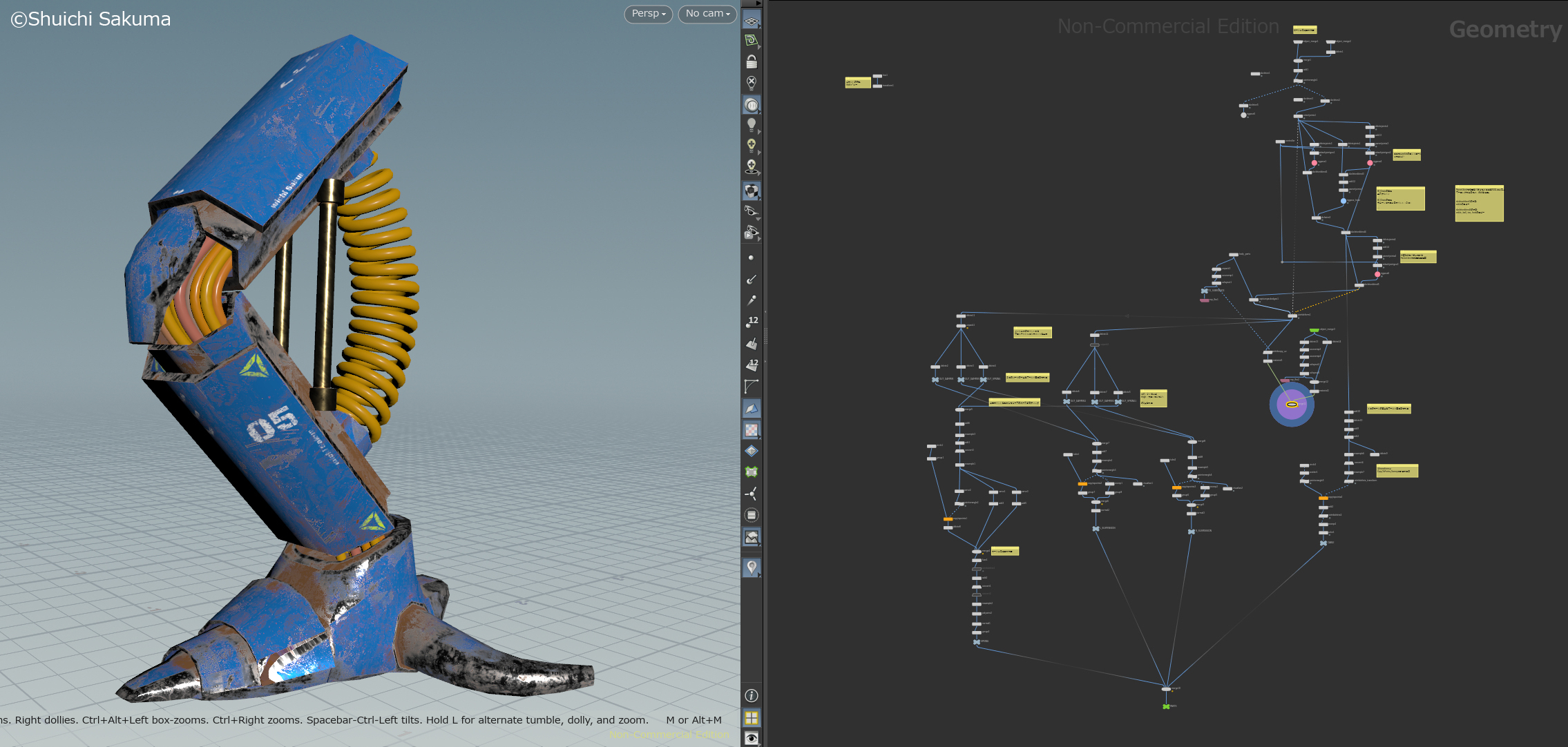
Houdiniで蜘蛛のリグを作ってみた。
ベースは2年前に作ったものをカスタマイズ。
KineFXをベースにして、蜘蛛の足の運びを作るためにサイクロイド曲線をVEXで実装して使用した。
また、リグに対する外装パーツ装着のためにジョイントのベクトルを操作する必要があったため
そこでもVEXを使用した。
以下は作業画面。
手動で動かすのは頭頂部分だけで、残りのパーツは全て連動して動くようになっている。
キャラクターのリグが複雑になればなるほど、Houdiniのプロシージャルな制作手法のメリットが
享受できる。
以下は2年前に作成したもの。
ここ最近はHoudiniを使ってRBD(Rigid Body Dynamics)のシーンを作っている。
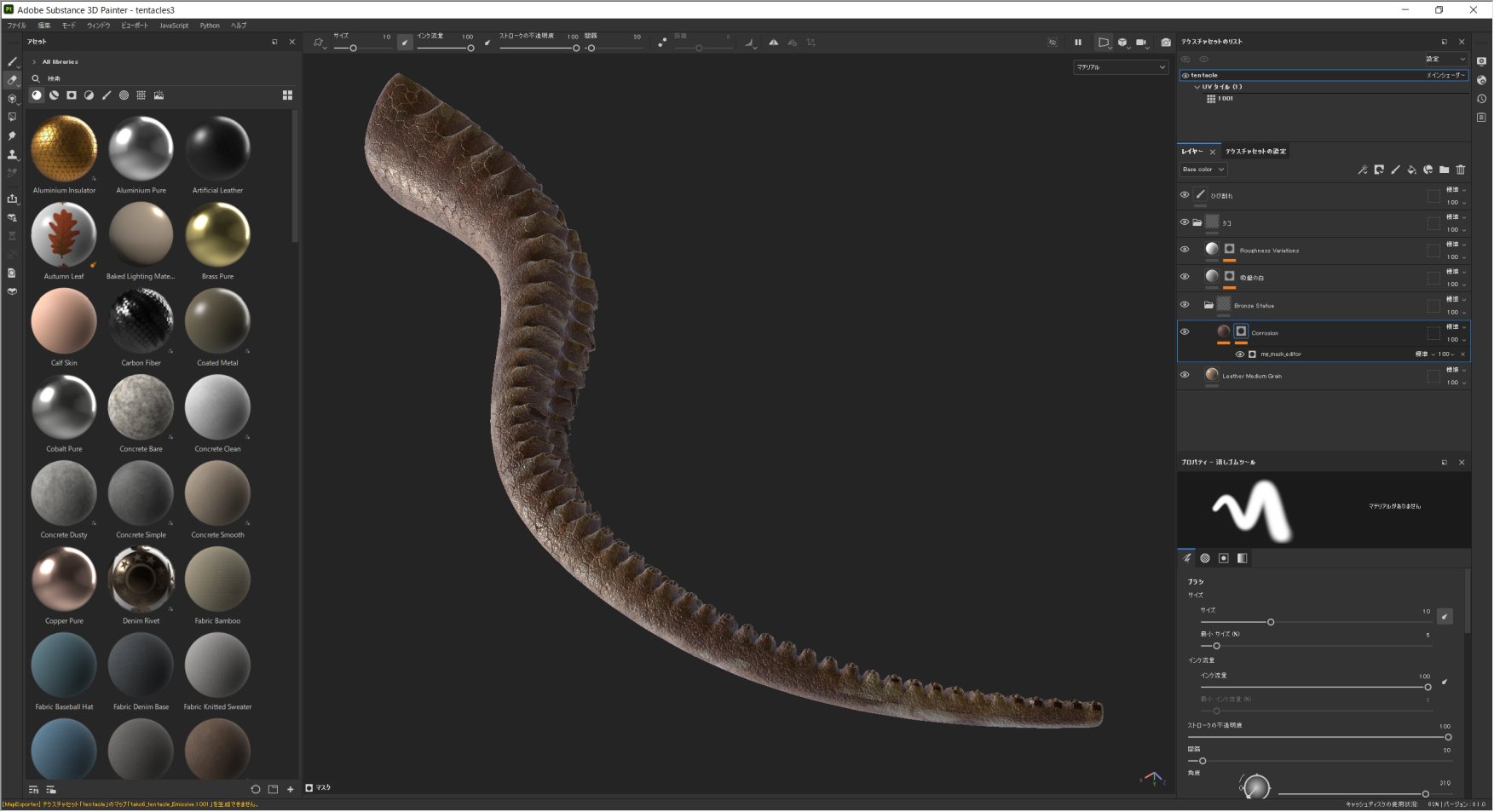
今回は転がる球体のテクスチャーをサブスタンスペインターで作成したので、その備忘録。
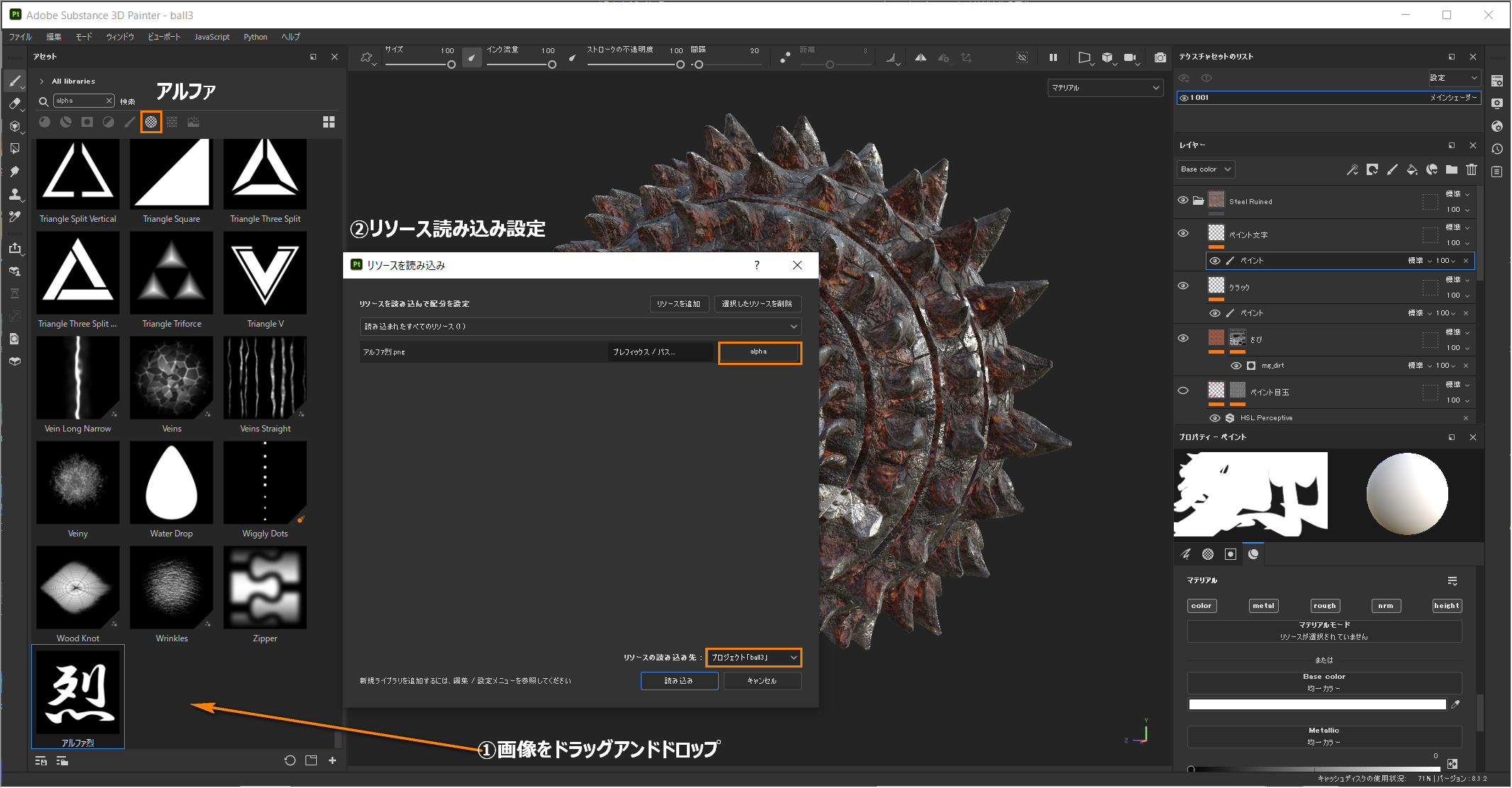
サブスタンスペインターのアルファには日本語フォントが1種類用意されているが、
あまり格好の良いフォントではないので、今回は漢字のアルファ画像をPhotoshopで作成した。
アルファ画像にするファイルは白黒画像をpngファイルで保存すればOK。

以下のように作成した画像ファイルをサブスタンスペインターのアルファセクションへ
ドラッグ&ドロップで追加して、読み込み設定を行う。
読み込みモードには以下の3種類がある。
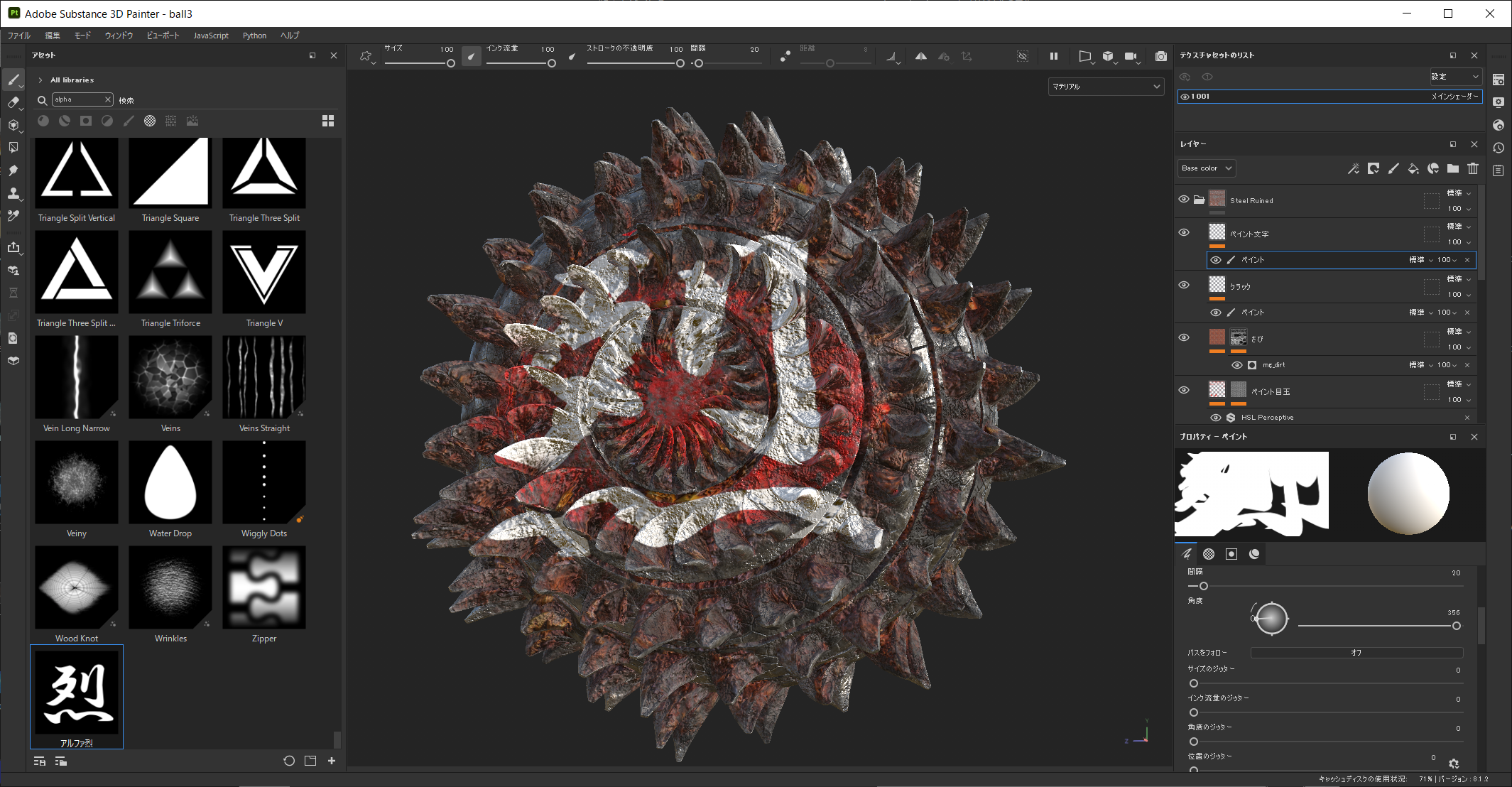
以下のようにブラシに読み込んだアルファ画像を設定し、
ジオメトリをクリックして漢字ペイントを行った。
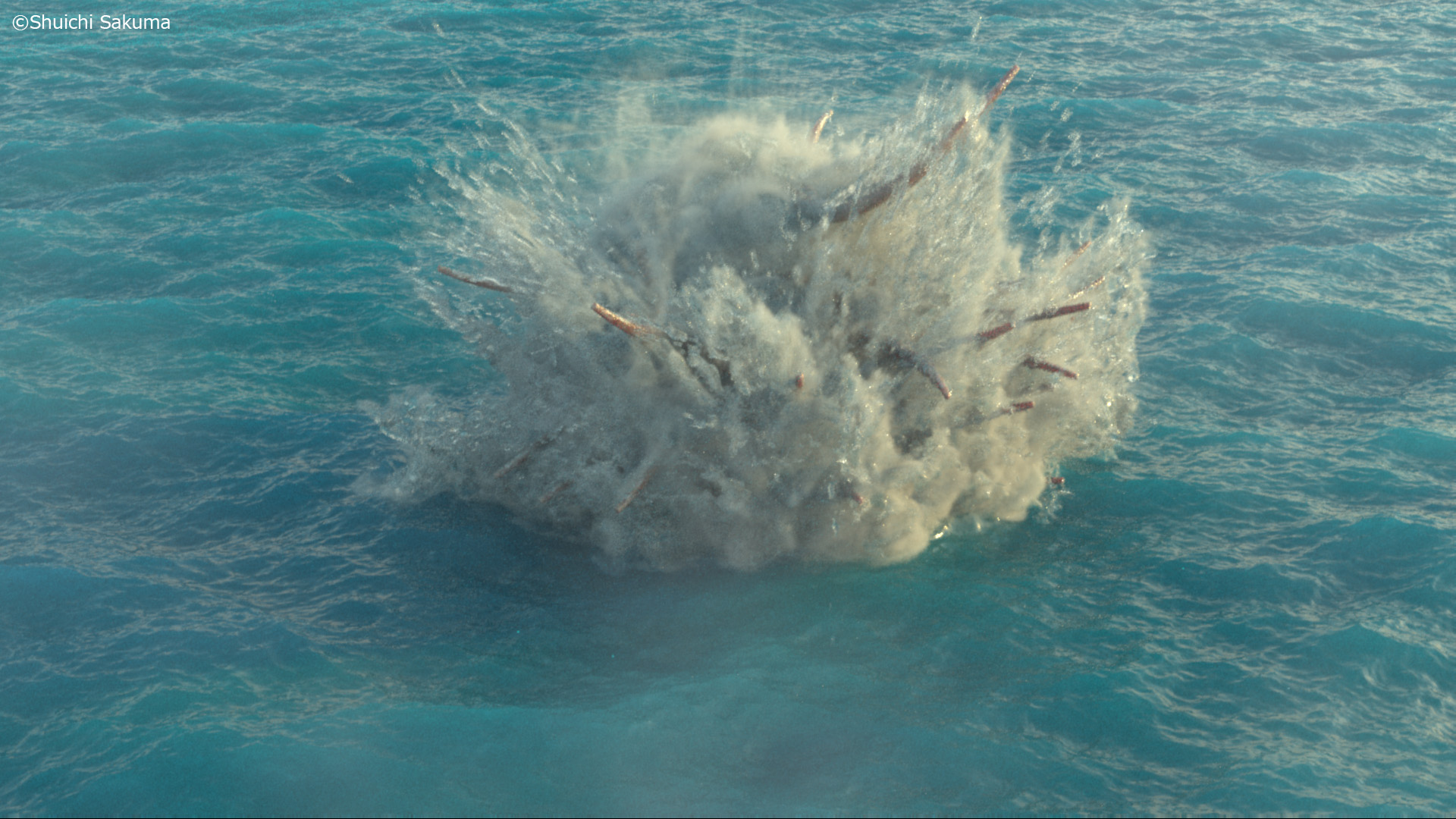
Houdiniを使った流体シミュレーションその9。
今回はタコ型のクリーチャーを作ってみた。
タコのモデリング、アニメーション、シミュレーション、レンダリングは全てHoudiniで行った。
テクスチャーはSubstance Painterを使用。コンポジットはNuke。
今回作成したタコのサイズはかなり大きいため、FLIPシミュレーションのプールサイズは
100m x 40m x 100mの巨大サイズになった。
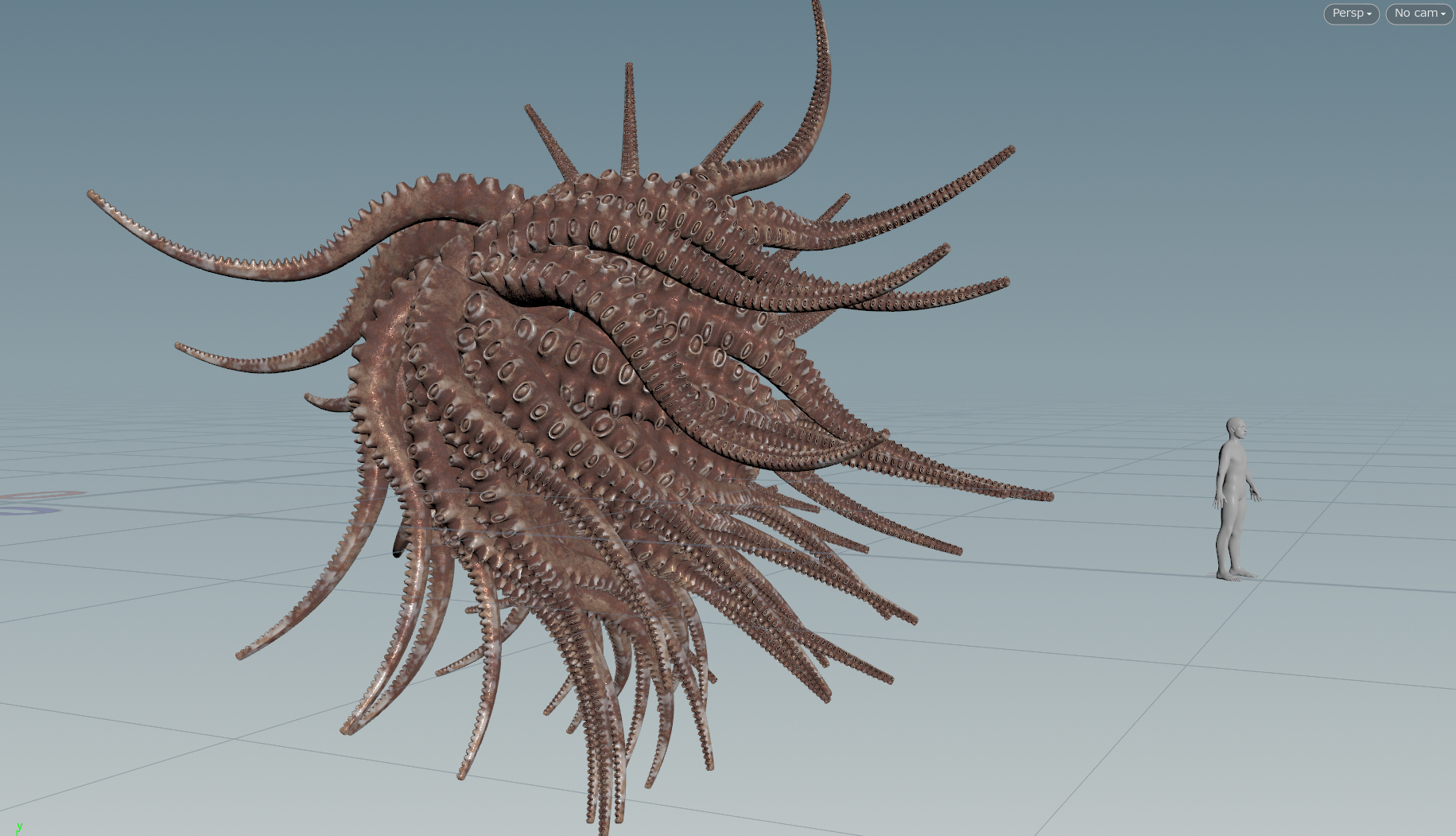
流体のパーティクル数はFLIPが約2500万、ホワイトウォーターが約2000万。
さらにタコの触手から放出される自前で実装したホワイトウォーターに3500万程度を使用した。
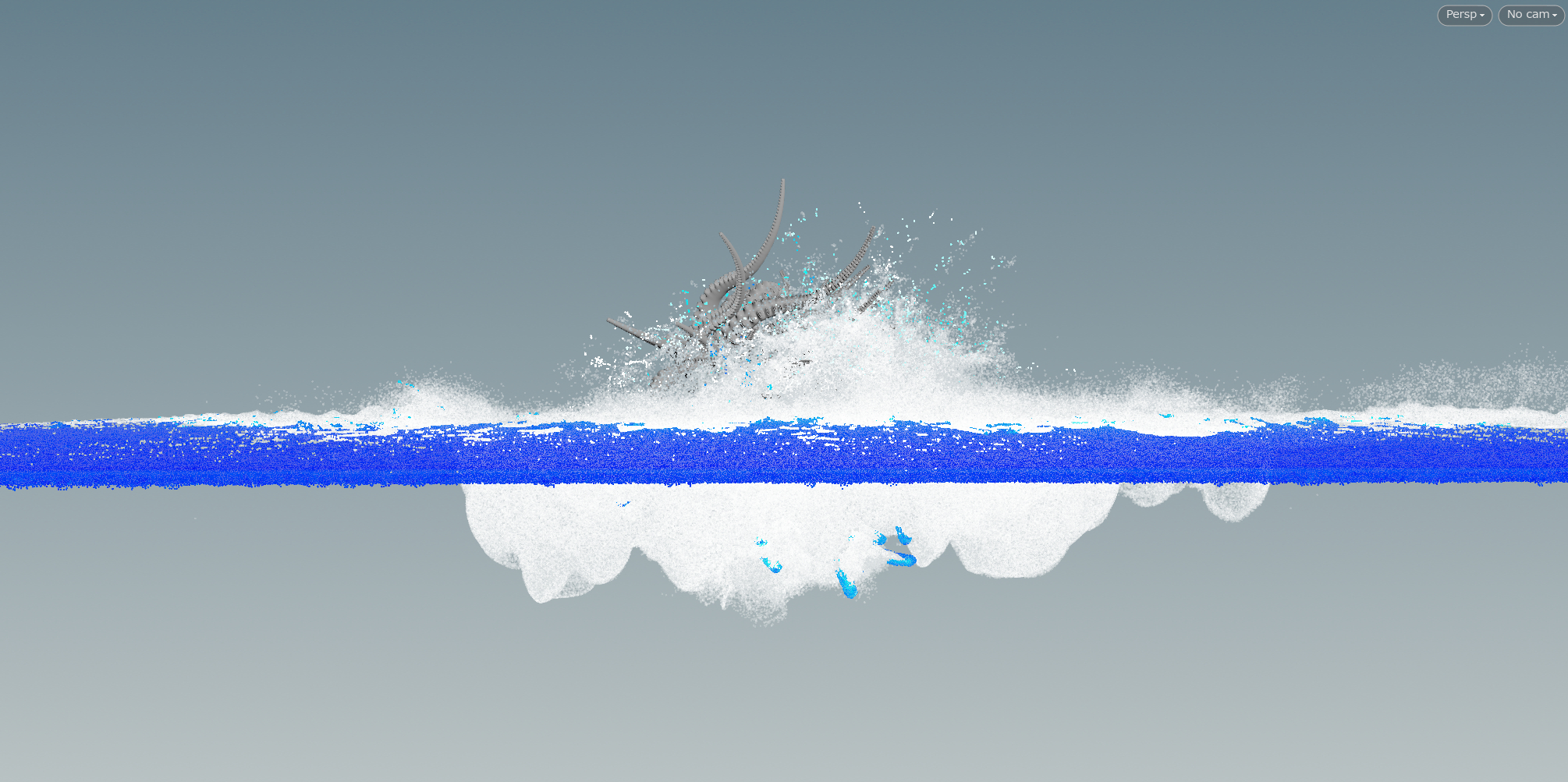
作業PCのメモリは128GBだが、この規模のシミュレーションでは全然足りなかったため
様々な最適化を行って計算が回るように調整した。
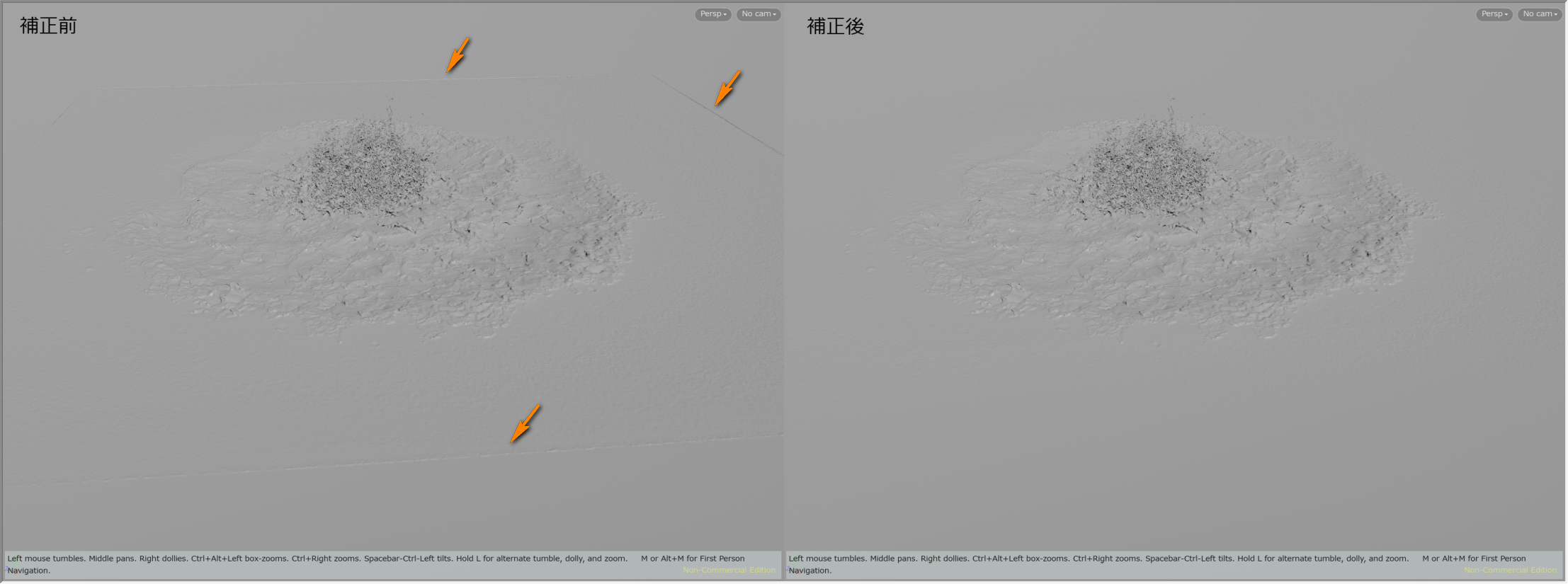
また、FLIPシミュレーションのプール周辺付近におけるサーフェイスの連続性をキープするために
VEXで補正プログラムを書いた。




HoudiniのRBDを使用してコインのシミュレーションを行ってみた。
TimeShiftを使った簡単なトリックも組み込んだ。
本日撮ったエルの写真。
エルは今年の10月で10歳になるが
顔立ちには子猫時代の幼さがずっと残っている。


もちろん猫なので「全てわかっています」的な
達観した表情も見せるが、全体としては幼さが目立つ。
多分、ずっと変わらないんだろうな。
シーグラフ2022で発表されたジョイントを使用しないPixarのリギングシステム。
面倒なウェイト付けが全く必要ないらしい。
これをHoudini 20の目玉機能として実装して欲しい。
これがHoudiniに実装されたらHoudiniでキャラクターアニメーションをつくる人が
一気に増えるだろうな。
論文:https://graphics.pixar.com/library/ProfileMover/paper.pdf
人間が食事している間、エルはハンモックから
こっちを見ながら食事が終わるのを待っている。
(ノルウェージャンはしっぽが長いのでハンモックに収まらない)

そのまま寝ちゃいそう。

今回、HoudiniにKineFXが実装される以前に作成したロボットのリグを
KineFXにコンバートしてみた。
以前のHoudiniでは、リグはObjectレベルでBoneノードをベースに実装していた。
仕組みとしてはBoneノードの階層に対してCHOP内でIKチェーンを設定して
別階層のNullノードからIKチェーンのゴールをコントロールするやり方をとっていた。
この場合、ロボットのパーツはそれぞれBoneノードにペアレントする必要があった。
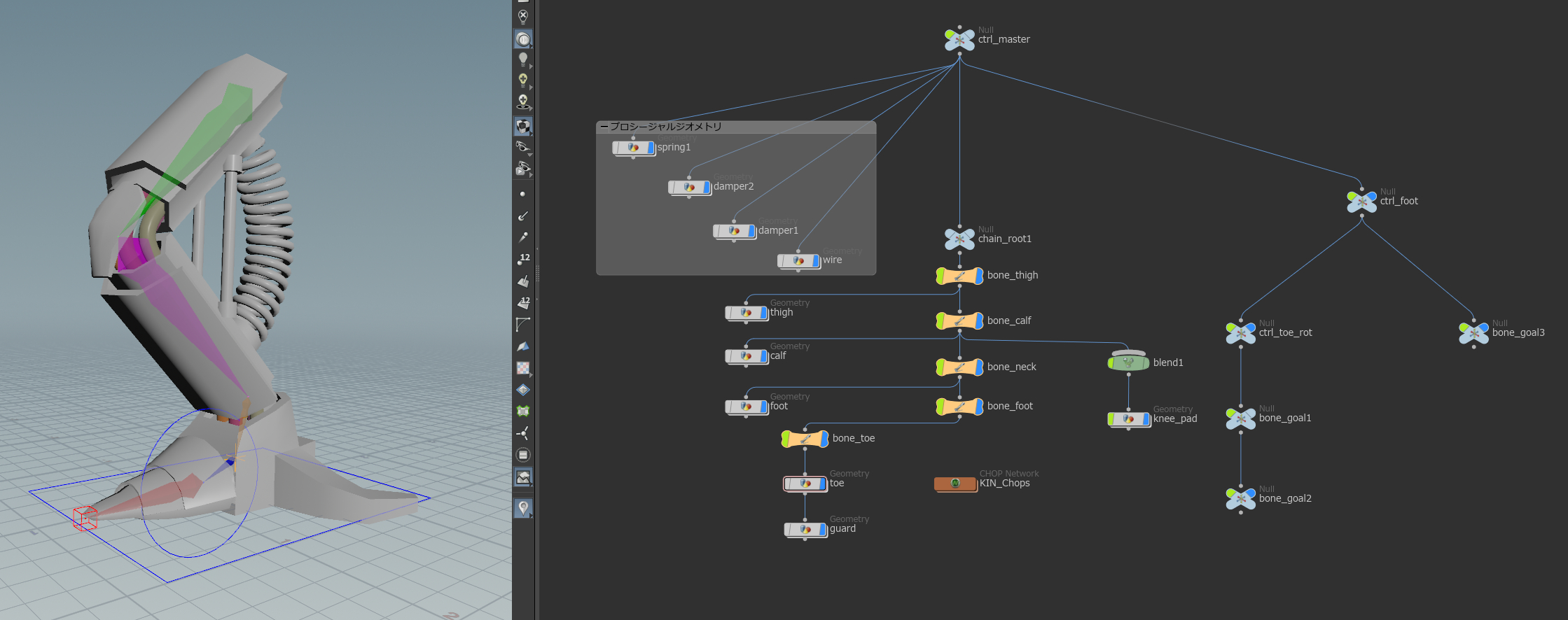
それに対し、KineFXが実装された今ではSOP内でそれらを全て実装できるようになった。
つまり、骨に相当するジョイント階層の作成や、IKチェーンの作成、リギング、
ジョイントに対するパーツのペアレント化などは全てSOP内で行うことができる。
また、KineFXはプロシージャルに階層内の親子関係の組み換えも可能なので、
いわゆる足の「リバースフット」の実装も比較的簡単に行うことができた。
KineFX作業動画
もう今後Boneノードを使用することはないだろうな~
(Houdini19ではObjectレベルでTabキーを押して”bone”と入力するとまだ作成できます)