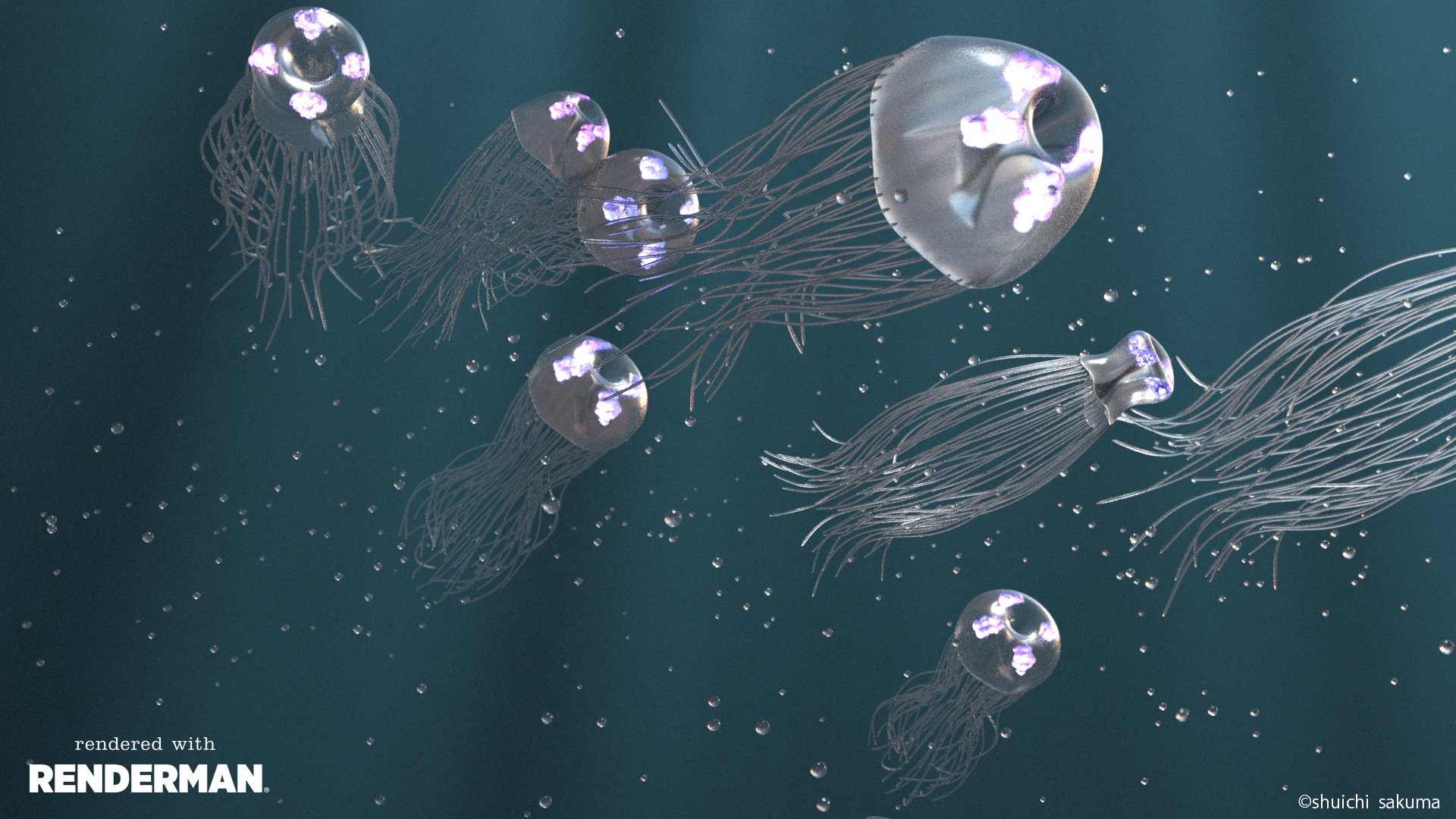
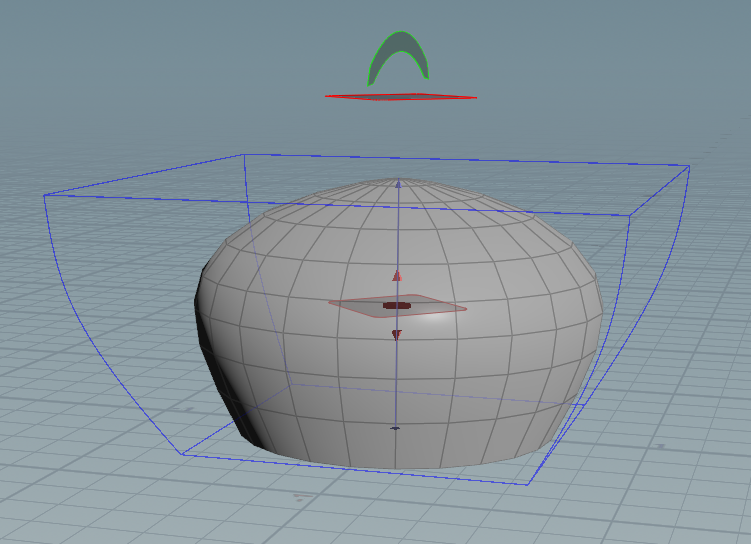
以前Houdiniで作成したFurのグルーミングを修正した。
さらに今回はテクスチャーからファーの色をコントロールしてみた。
動物系のファーはどのくらいの太さパラメーターが適切なのか今回も試行錯誤。
レンダリングはMantra。

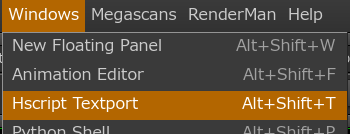
作業途中ではPaintノードを多用したが、Houdini18.5では隠しノードになっており
[TAB]キーからは作れないため、その対処法を書いておく。
1 メニューから[Windows] -> [HScript Textport]を選択しターミナルを表示
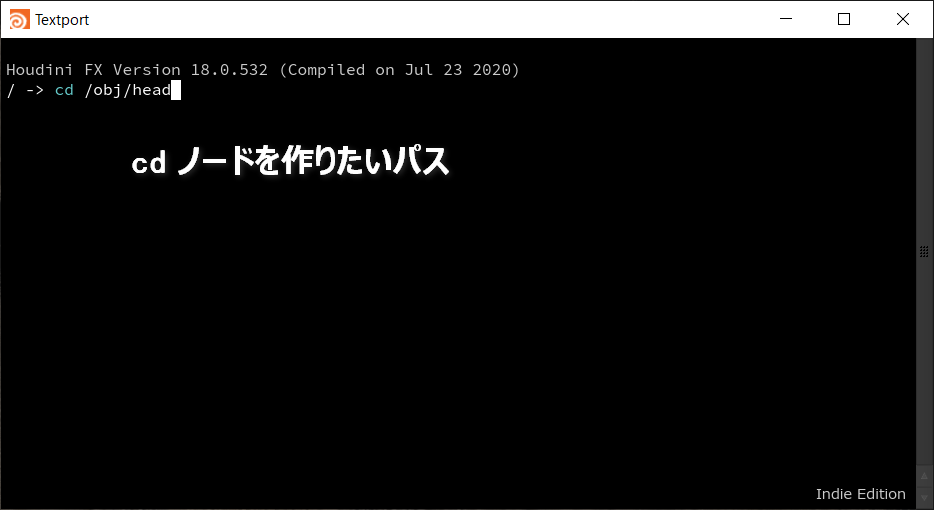
2「cd 現在作業しているパス」と書いて[Enter]を押す
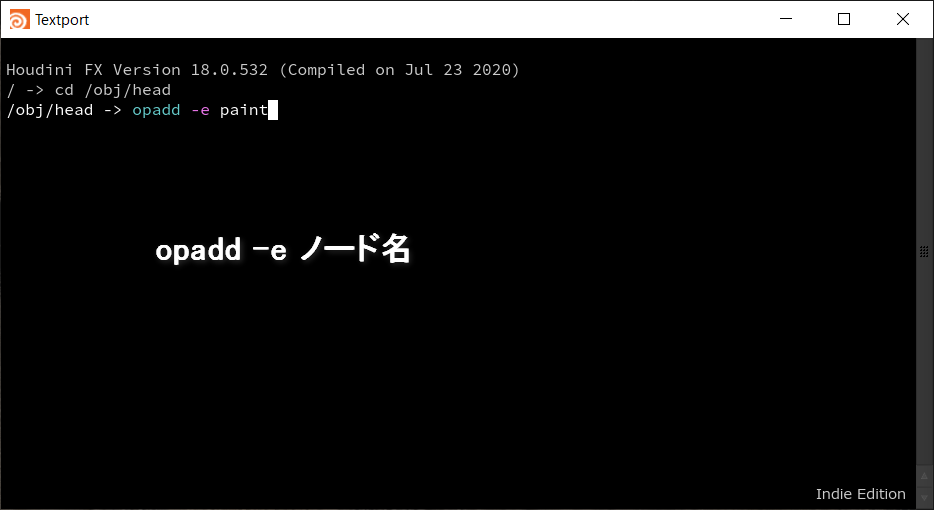
3「opadd -e paint」と書いて[Enter]を押す
4 座標(0,0)にPaintノードが作られる
[参照元]
https://forums.odforce.net/topic/30008-accessing-old-polyextrude-sop-in-h16/